電装・操縦班の日記です。
書いた人: Y.U | 17/07/29 00:37
こんばんは、ロガー担当のY.Uです。時の流れは早いもので、僕たち17執行代の活動も残すところあと2日となりました。
昨年の春に鳥コン落選の通知を受けて、17執行代はチームとして逆境に立たされた状況で始動しました。「去年の自分たちには何が不足していたのか、またそれを克服するために自分たちができることは何か」という問いについて、これまでに部員同士で幾度となく協議を重ねてきたことは今でも鮮明に覚えています。だからこそ、第40回鳥人間コンテスト・ディスタンス部門への出場が決まった時はこの上なく嬉しかった。
4月に入ってからは天候に恵まれないこともありましたが、桶川での試験飛行を着々と積み重ね、その度にパイロットや全体設計へ向けてのユーザーインターフェースの改善などを行ってきました。その結果、6月の最終TFではすべての計器間の通信が正常に機能し、今年の電操班としての目標に掲げていた最低限の基準にまで到達しました。
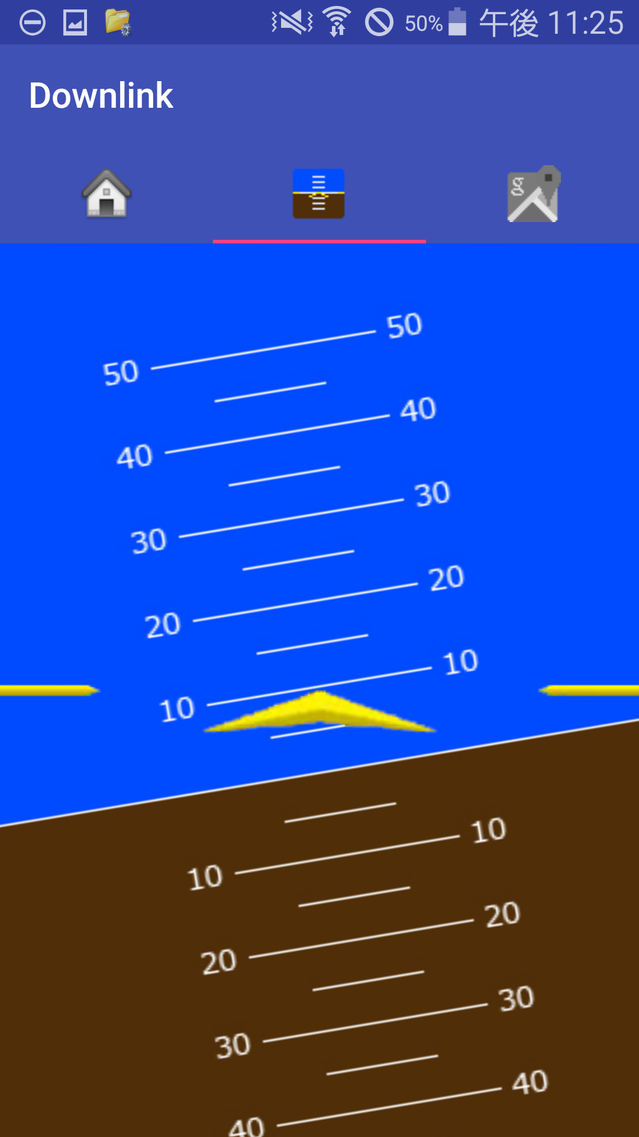
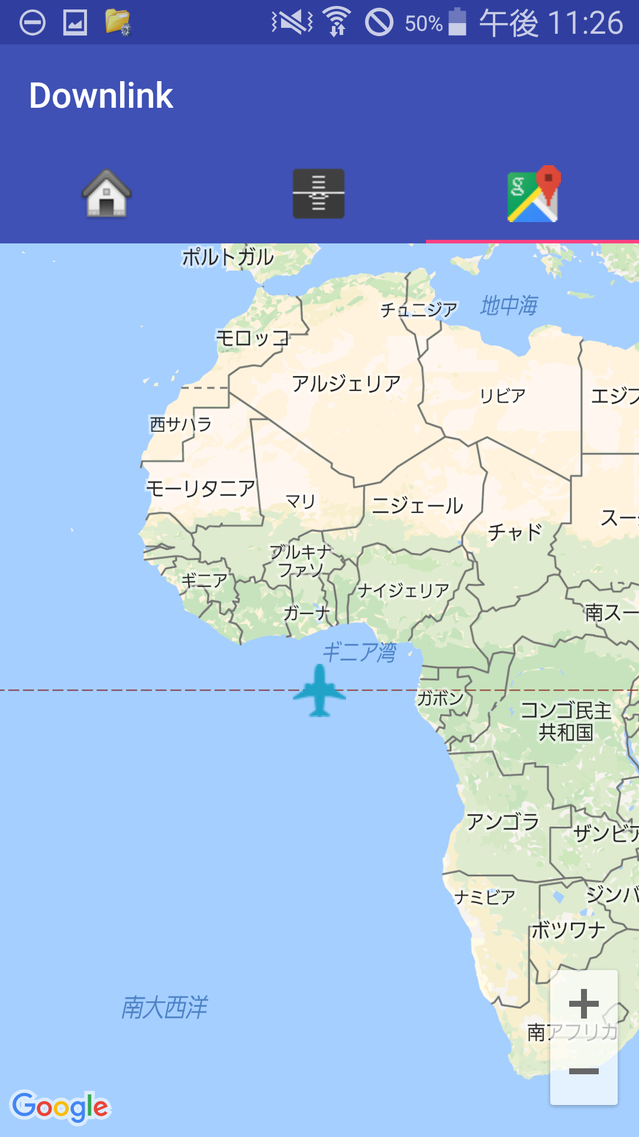
直近の一か月間では、飛行記録に関するオンラインデータベースの秘匿性の向上、およびそれを利用したダウンリンクシステムのデザインの更なる改良に尽力しました。開発の都合上クライアントはAndroidのみとなりましたが、アプリケーションのレイアウトは下の写真に示したように単純で見やすい設計にすることができました!!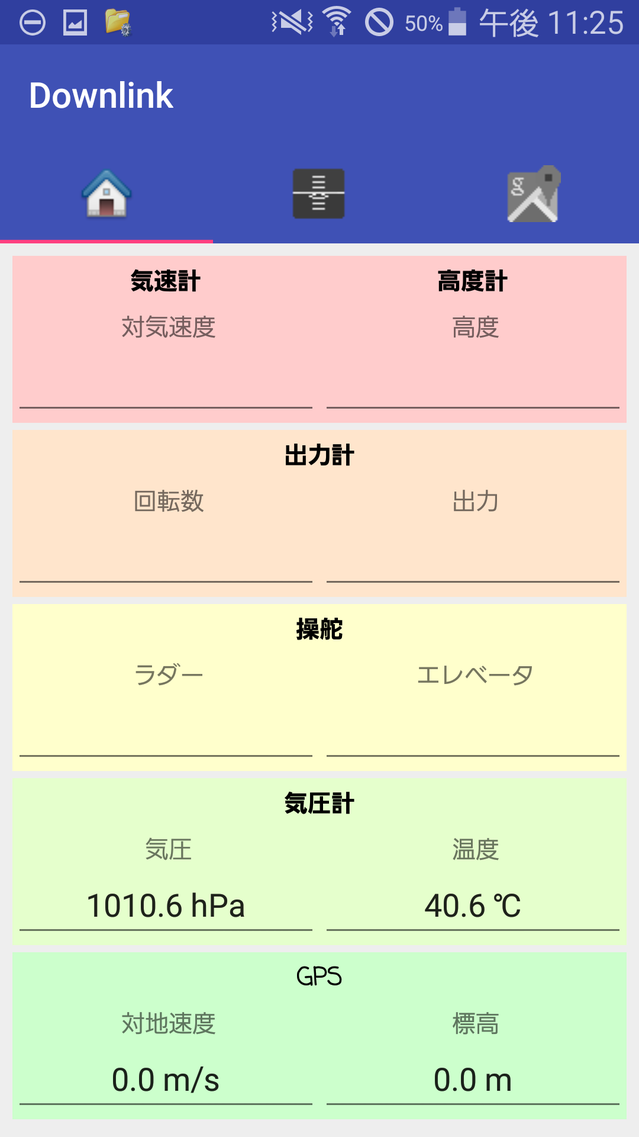
 部員それぞれの魂が込められた今年の機体"Gloria"の製作に携われて、僕は幸せでした。あとは機体が40km飛ぶよう祈るのみです。鳥コン2日目のフライトでは、ダウンリンクを利用して機体と並走するボートの他、プラットフォーム上からも五十嵐の活躍を見守りたいと思います。
部員それぞれの魂が込められた今年の機体"Gloria"の製作に携われて、僕は幸せでした。あとは機体が40km飛ぶよう祈るのみです。鳥コン2日目のフライトでは、ダウンリンクを利用して機体と並走するボートの他、プラットフォーム上からも五十嵐の活躍を見守りたいと思います。
P.S.
今年のGSU、ASU、TFでのすべての電装ログをまとめたので、改めてここに掲載いたします。
Logdata_part1.zip
鳥コン本番での飛行ログに関しては、テレビ放映後にこの場をお借りして公開する予定ですのでお楽しみに!
コメントを書く
書いた人: Y.U | 17/05/07 10:37
こんにちは、ロガー担当のY.Uです。
4/29に行われた2ndTFと、昨日の3rdTFのログを掲載いたします。今年の機体Gloriaは去年に比べて設計機速が速いので、機体の保持に入るのがなかなかきついです。(汗)
~2ndTF~
2ndTFログ.zip
~3rdTF~
3rdTFログ.zip
諸々の事情により所々ログが取れていない計器があったりしますが、システム全体としては概ね正常に動作しており順調だと思います。不具合があった計器については、次回TFまでに原因究明して班員に改善してもらうつもりです。
話は変わりますが、先日全体設計から「ダウンリンクを早く実装しろ」と煽られました。なるべく早く完成させられるよう頑張ります。(笑)
コメントを書く

こんばんは、元電装・操舵班ロガー担当のY.Uです。
先ほど第40回鳥人間コンテストのテレビ放送が行われました。今年は往復40kmの大記録を達成したチームをはじめとする強豪チームがひしめき、激戦が繰り広げられた大会でしたね。Meisterはディスタンス部門5位で、残念ながらダイジェストとなってしまいました...。
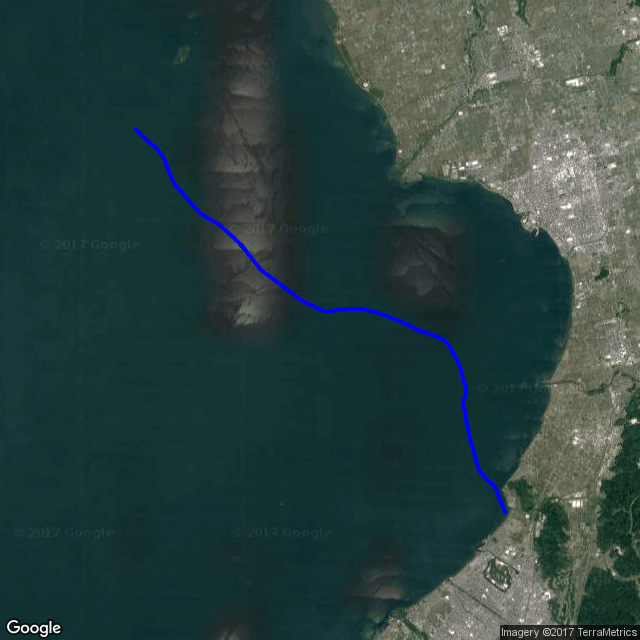
前回の記事でもお伝えしたように、ロガー担当最後の仕事として以下に琵琶湖でのフライトログを掲載いたします。
続いては対気速度、対地速度のログです。対気速度に関してはフライトを通じて6m/s前後で安定していました。一方で、途中で進路を変えたことにより背風の中でのフライトとなった影響か、対地速度は6km地点通過後では9m/s前後と大きな値になっていました。
高度のログです。フライト開始早々、1.5km地点と2.5km地点で高度が2m以下まで低下し着水が危ぶまれましたが、パイロットが出力を上げたりエレベータを駆使することでうまく対応してくれました。気圧式高度計はリアルタイム表示を行う場合ゼロ点の調整が難しそうですが、今回データ処理をしてみたことで想定していたよりも分解能・精度ともに優れていたことが判明しました。
クランク回転数と出力のログです。回転数は80RPM前後で安定していました。また、定常時(Timeが1000000ms~2000000msの区間)の出力の合算値についてその時間平均を求めたところ、約242Wと設計出力(240W)にかなり近い値でした。
最後は姿勢角のログです。着水寸前はエレベータの操舵により機首上げの状態が続きましたが、それを除けばロール方向やピッチ方向の傾きは少なく、終始安定した姿勢で飛行できていました。
フライトログの詳細につきましては、以下のzipファイルをダウンロードして御覧いただければと思います。
Logdata_part2.zip
残念ながら4年ぶりのディスタンス部門優勝を成し遂げることはできませんでしたが、チームの力の最大限を発揮した最高のフライトだったと思います。1年間熱心に製作してきた機体が飛ぶ姿からは、多くの感動を味わうことができました。
最後になりますが、私たちが今年こうして琵琶湖の舞台に立つことができたのは、応援・支援してくださる多くの方の御存在があったからこそだと思っております。本当にありがとうございました。後輩には今年の活動で得られた反省点をしっかりと活かしてもらい、来年こそは優勝の座をつかみ取って欲しいと思います。