I.F.が2012年12月 7日に書いた記事です。
書いた人: I.F. | 12/12/07 08:22 | コメント(9)
はじめまして、大変今更ですが先日現役を引退した2012年度エレキ班主任パワー系担当、3年のI.F.です。
引退してから初めて活動報告をすることになってしまい、申し訳ありません。いろいろと余裕がなく、報告は怠っていましたが、きちんと活動はしてまいりました。長くなりますが、ここで一気に報告をさせていただきたいと思います。
これまでに私はロガーの新回路(ハードのみ)などを作ったりしていますが、ここでは7月頃に原型が完成、その後改良し、9月30日の袖ヶ浦大会から使用している自作の双方向DC-DCコンバーターを紹介します。
以下に示すのがその主回路部分です。
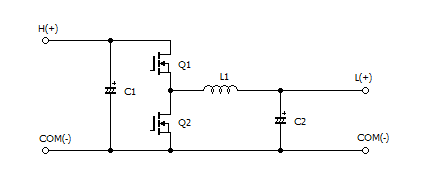
Q1,Q2を相補PWM(Q1がオンのときQ2はオフ、Q2がオンのときQ1はオフ)でスイッチングします。Q1のDuty比をαとすると、H(+)の電圧VH、L(+)の電圧VLの間には大体VL=αVLの関係が成り立ちます。H(+)側とL(+)側のどちらからどちらへ電流が流れるかは接続する負荷・電源の電圧で決まり、どちら向きにも自由に電流が流れます。通常の同期整流方式DC-DCコンバーターでは、インダクタの電流が逆流しないように制御を行うことが多いようですが、あえてそういうことはしていません。そのため軽負荷では目的の方向と逆符号の電流がインダクタに流れる期間が存在し、無負荷でもインダクタに交流電流が流れます。
H(+)とL(+)の電圧のフィードバック制御を行いますが、H(+)とL(+)のどちらを制御するかはDIPスイッチで選択できます。電流は制御しません。
MOSFETはFairchild製のFDP036N10Aを使用しています。耐圧は100Vと高耐圧のわりにオン抵抗は小さく、3.2mΩだそうです。ゲート容量は小さく、速度も高速で、なかなか良い奴です。
インダクタはマイスター倉庫に何年も前からある、アモルファスカットコアの100μH, 巻線抵抗7.6mΩ位のものを使っています。
制御回路の電源には高耐圧とするため自作のリニアレギュレータを使用しており、制御回路全体の消費電流は最大で20mA位です。
通常の降圧チョッパ・昇圧チョッパではフリーホイールあるいはブロッキングダイオードで整流をするのでダイオードの電圧降下による損失がそれなりにあります。ところがこのDC-DCコンバーターのような双方向チョッパでは、デッドタイムを除いてQ1とQ2のいずれかには必ずゲートに電圧を加えてオンにするので、MOSFETでの電圧降下はほぼオン抵抗によるもののみです。そのために使い方によっては大変高効率で、例えばVL=20[V], VH=40[V]でH(+)側へ10A出力しているとき約97%(制御回路の電力消費は計算に含めない)という測定結果が出ました。一方、VL=5[V], VH=10[V]でH(+)側へ8A出力の時には90%と電圧比が同じでも効率はだいぶ違うようです。電圧降下の影響が相対的に大きくなるからでしょうか。
このDC-DCコンバーターは上述したように逆流防止をしないので、無負荷で動作させると制御回路の消費電流とは別にH(+)側では通常数十mA、最悪100mA程度電流を消費するという欠点があります。
このDC-DCコンバーターを第2回袖ヶ浦大会、舞洲大会では次のように使いました。
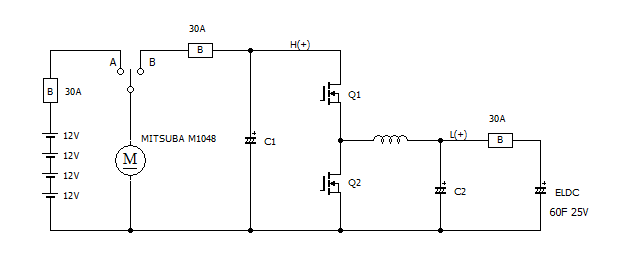
回生用に600F2.5Vの電気二重層キャパシタを10直にしたものを使いました。キャパシタの電圧VLを双方向DC-DCコンバーターでVHに昇圧してやると、モーター側から見ると電圧VH、容量VL/VH倍のキャパシタに見えます。つまり、VHをボリュームで調整できるようにすると、可変電圧・容量キャパシタのように振舞わせることが出来るわけです。VHがモーター起電力より高ければキャパシタからモーターへ、VHがモーター起電力より低ければモーターからキャパシタへ電力が勝手に流れていくので、力行・回生をシームレスに行うことが出来ます。
先日のNATS大会では、以下のような回路構成としました。
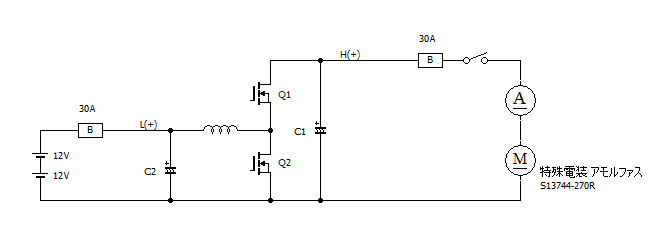
S13744-270Rはフルボリュームで入力電流が1.5~6Aのとき効率90%以上なので、通電時は常に、特に電力消費の大きい登坂時にはこの領域で使えるようにすればモーター的には理想的である考えられます。とりあえず、NATSの勾配4%の登り坂で空気抵抗などを無視してフルボリューム6A時のトルクで力の釣り合いがとれるようなギアの減速比を計算してみると11くらいになりますが、取り付けられるギアの組み合わせで減速比が最大となるのは120:20=6:1の6なので、とりあえずこの組み合わせとします。ところが減速比6だと電源24Vのとき、無負荷回転数時の速度が31km/hになります。私たちのような構成ではNATSでは上り坂の平坦なストレートで十分に速度を上げて、その勢いで登坂してモーター電流が上がり過ぎないようにする方法が良いと考えているので、無負荷でこの速度は少し遅いと考えられます。そこで上図のようにDC-DCコンバーターを使用して電源電圧を動作保障電圧の最大の30V(絶対最大定格は40V?)まで昇圧できるようにすると、無負荷時の速度を39km/h程度まで上げることができ、十分加速することが出来るようになります。
また、電源電圧が固定の場合、フルボリュームでは電流は速度と電源電圧によって決まるので、電流をコントロールするためにはボリュームを絞ることになります。ところがボリュームを絞るとモーターコントローラーのPWMにより効率が悪化し、さらに電流計に表示されるモーターの入力電流と巻線電流が対応しなくなるので、ドライバーが巻線電流を効率が良い領域にコントロールするのが難しくなります。そこでギア比を大きめにしてDC-DCコンバーターで昇圧するようにすると、速度が上がってモーターの起電力がある程度まで上がればモーターコントローラーはフルボリュームにして、DC-DCコンバーターのボリュームをモーターの入力電流(∝巻線電流の実効値)を電流計で見ながら操作することが出来るようになります。
ちなみにDC-DCコンバーターはVL=20[V] → VH=30[V]程度の昇圧であれば、効率98%~99%程度で使用できるという測定結果が出ている(測定誤差がどのくらいあるのかが気になりますが...)ので、DC-DCコンバーターの損失は無視して良いと考えました。
バッテリーに並列に11直のキャパシタを接続してバッテリーの電流をある程度平滑化させようかとも考えましたが、試しに11直にして20Vくらいまで充電してみたところ、物によって1.6Vだったり2.2Vだったりと、かなりばらついて25Vまで充電すると一部定格をオーバーするので止めました。
さて、実際に大会で使用してみてどうだったかが問題ですが、例としてNATSのログデータのうち分かりやすい1周分を以下に示します。
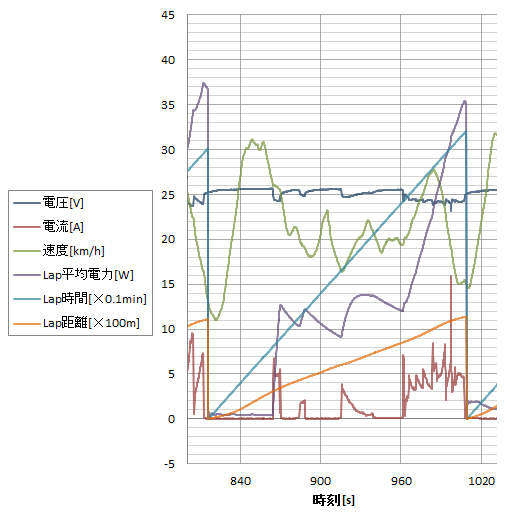
グラフの電流はバッテリー電流です。便宜上ラップ計測は坂の頂上から行っています。時刻960~1000[s]の電流波形から、ドライバーがモーター電流を一定にしようとしてくれているのが分かります。やはり刻々と変化しようする電流値をレース中に電流計を見ながら一定に保つように操作するのは少し難しいようで、波形がギザギザしています。(それでもこのラップの波形はかなりきれいな方です。)
DC-DCコンバーターは電流測定機能をつけ、CV・CC制御するのが理想的なようです。
実はロガーはデータ記録のトラブルがずっと以前より解消できておらず、データははじめの30分位しか取れていませんでしたが、平均すると大体1ラップで平均電力37W、ラップタイム3:00程度で、電力を使い過ぎな気はしますが雨天にしては悪くなかったのではないかと思います。
ところが先日のエコノ日記で村上君が報告しているように、開始から25分程度で車体トラブルが発生し、ピットインを繰り返すことになってしまい、あまり良い結果にはなりませんでした。
結局、1年通して私たちの代ではどのレースでもまともに走れずに引退を迎えることとなってしまいました。
思い返すと、私たちの代では様々な失敗をしました。エレキ班としてはモーターを2回破壊させています。
1回目は特電アモルファスモーターS13744-270Rです。
簡単に説明するのは難しいのですが、訳あってモーターから軸を引き抜こうとしましたが、軸とベアリングのはめあいが予想以上にきつくて中途半端にしか抜けず、仕方なく戻そうとしても簡単には戻らず、何とかしなければならないと焦って無理やり押し込んでもとの位置に戻しました。位置は元に戻りましたが回転させると異常な抵抗を感じたので、後日引き抜き工具を作って軸を完全に引き抜いたところ、ベアリングとハウジングの間(側面)に波ワッシャーが挟まりハウジングに亀裂が入ってしまっていました。

波ワッシャーは写真のベアリングの向こうにあったものです。軸を少し引き抜いてベアリングがハウジングから外れた際に、波ワッシャーがずれてベアリングとハウジングの間に入り込んだようです。結局このハウジングは交換することになりました。この件に関して、ZDPさんにはお世話になりました。
2回目はMITSUBA M1048のモーターコントローラーです。
菅生大会直前のテストラン前、車体のセットアップがすべて終わった後、確認のためにモーターに通電して空転させました。勢い良く回るモーター、しかしまもなく「バチッ」と音がして回転が止まり、その後はうんともすんとも言わなくなりました。もしやと思ってモーター本体から出ている電線を見ると、ローターと電線がこすれて被覆が切れて導体が見えていました。金属製のローターを通して動力線と角度センサのグラウンド線がショートし、モーターコントローラーの制御回路内に大電流が侵入、基板のグラウンドパターンを吹き飛ばして致命的なダメージを与えてしまったようです。
この事故は菅生大会の数日前だったので、大会は棄権することになってしまいました。チームのメンバーおよび応援してくださった方々には申し訳ないことをしたと思います。
その後MITSUBAさんに調査をしていただきましたが、修理不可ということでコントローラは再購入することになりました。
車体の構造上、ローターと電線は接触しやすい位置に来ることがありますが、電線は確実な方法で固定しておらず、さらに回転前に危険がないかモーター周辺をきちんと確認をしなかったのがいけなかったのだと思います。
以後、電線は結束バンドで固定し、回転前の確認を徹底するようにしました。
少々のずさんさが大きな損害に繋がる事がありえるということを痛感しました。
他にもいくつかありますが、後輩たちには我々の失敗を教訓として、良い結果を残してくれることを期待しています。
他にも書きたいことはいろいろありますが、あまりにも長くなりすぎてしまうのでこの辺で止めておきます。
これまで応援してくださった方々には本当に感謝いたします。
今後も後輩の応援をよろしくお願いいたします。

コメント(9)
新浜京都(元エレキ主任) | 12/12/09 01:21 | 返信
なるほど、おもしろい工夫をしたね。
用途を限定することにより、逆流防止をしなくても問題なく、簡略化することができたんだね。
逆流をあえて許容するというところが逆転の発想だ。
袖ヶ浦・舞洲の場合、モーター逆起電力がVHを越えたとき、DC-DC内部ではどういう風に電流が流れるのか少し難しい気もしますが(効率がどうなるのかわかりませんが)、キャパシタの見かけの容量が可変という点が、おもしろい。
また、C1側がモーター限定となっていることにより、内部抵抗により、突入電流の心配をすることがない。これにより、回路を昇圧回路として捉えることができて、duty比の制御を0%から開始できる。
NATSでつりあいトルク(速度一定)とするのはいいのかはわかりませんが、登坂時にコントローラのボリュームを絞らずに、効率のいいDC-DCのボリュームで速度をコントロールできるということは評価に値すると思います(ほんとに効率が良ければですが)。
ただ、DC-DCでどこまでの速度域をカバーできるのかな?
後輩たちの活躍にも期待します。
それでは・・・
中村@first_step | 12/12/09 02:01 | 返信
>無負荷で動作させると制御回路の消費電流とは別にH(+)側では通常数十mA、最悪100mA程度電流を消費するという欠点があります。
そんなに流れないような気もしますが、、、
時定数小さいのにキャリア周波数めっちゃ低いとか?
Q1Q2とL1の間で浮遊静電容量がめっちゃ大きくてキャリア周波数めっちゃ高いとか、、、
はやし(OB) | 12/12/09 02:31 | 返信
お疲れ様です。
キャパシタは最初に同一条件で充電してから直列につなぐとバラツキが抑えられますよ(やってるかもしれないけど)。
I.F.から新浜京都(元エレキ主任)への返信 | 12/12/09 20:21 | 返信
>キャパシタの見かけの容量が可変という点が、おもしろい。
大会では専らキャパシタの電圧を変えるために使用していましたが、倉庫ではDuty比を一定にして見かけの容量を変更する目的で使用したことが実際にあります。
せっかくなので、コメント欄ではありますが簡単に説明します。
先輩の作ったモーターベンチの制御回路はしばらくの間壊れてしまっていたために使えませんでしたが、それでも何とか実際にモーターに負荷をかけて回転させて回路の試験とドライバーの操作の練習をしたいと思ったので、このようにしました。
/reports/econo/10IF/IFM2098.PNG
直流モーターにキャパシタをつなぐと、抵抗値などによる損失をすべて無視した場合に成り立つ方程式は、空気抵抗などの損失をすべて無視した場合の車体の運動方程式と同形になります。そのため、キャパシタの容量をうまく選べば、車体を走らせているのとそっくりな動作をするはずだと思いました。その容量を計算すると8F位になるので倉庫で眠っていた1200F 2.3Vのキャパシタを30本直列にして40Fとして、さらにDC-DCコンバーターを使って見かけの容量を8Fに調整しました。
実際に使ってみると、やはり実際にはいろいろな場所に抵抗値があるため、モーターにあまり電流を流さなくてもすぐに速度が上がってしまうなど、車体が軽すぎるような動作をしてしまいます。見かけの容量14F位(車体重量160kg相当)にすると割とそれっぽい動作をし、ちゃんと「惰性走行」もするようになりました。速度の2乗に比例する空気抵抗に相当する、電圧の3乗に比例する損失を発生させるのは単純にはできないので、代わりに損失が電圧の2乗に比例する抵抗(電気ストーブ)を取り付けました。
双方向DC-DCコンバーターは大会用のものとは別にもう1つ、実験用に作ってあったので、舞洲大会の前にはこのシステムで回路の試験とドライバーの操作練習をやりました。
(そういえばキャパシタの電圧のばらつきは大丈夫だったのか?)
このDC-DCコンバーターはDuty比を一定にしてキャパシタをつなぐと見かけの容量を変更できますが、抵抗をつなぐと見かけの抵抗値を変更できます。(周波数特性は異なりますが。)
>ただ、DC-DCでどこまでの速度域をカバーできるのかな?
減速比6では約25km/h以上でフルボリュームにできる(6A以上にならない)ようですが、特に今回は雨で速度が遅かったのでDC-DCだけでカバーできる期間は短かったかもしれません。速度域を広げるために減速比をさらに大きくし、モーターにはもっと高電圧をかけられればいいのですが…。
I.F.から中村@first_stepへの返信 | 12/12/09 20:27 | 返信
無負荷とはいっても電解コンデンサC1,C2は接続したままなので、充放電を繰り返してインダクタやコンデンサの内部抵抗などで損失が発生するようです。
周波数は15.625kHzです。
I.F.からはやし(OB)への返信 | 12/12/09 20:30 | 返信
アドバイスしていただきありがとうございます。
確かにバッテリーに並列に接続して使う場合にはそうすればよさそうですね。大会によっては時間に余裕がないことがあるので、よく練習をする必要がありそうです。
中村@first_stepからI.F.への返信 | 12/12/09 23:01 | 返信
C2って容量いくつでしょうか?
C1はあまり支配的でない気がします。
エネルギーって言う考えでいくと
「損失が発生してる」
でいいと思うのですが、
H側で電流が流れるって言う直接的な考えの方が良さそうな、、
L1とC2をシリーズにして15K50%で100mAも流れるのかな?
I.F.から中村@first_stepへの返信 | 12/12/14 16:45 | 返信
C1,C2は回路のケースに内蔵のものはいずれも1640uFですが、使用時には用途に合わせて大容量のものを外付けします。効率測定時には、電圧の変動が測定誤差につながると考えて、大き目のものを両側に外付けをしました。
無負時の消費電流をコンデンサを外付けせずにもう一度測りなおしてみましたが、H側を電源50Vの電源につないでL側を開放した場合にはDuty比50%で最大の45mAでした。
100mA以上流れるのはL側を電源につないでH側を開放した場合でした。電源10Vの場合Duty比20%以下で,電源25Vの場合Duty比48%以下で100mA以上になります。
測定には内部抵抗10ΩのテスターのmAレンジを使ったので、交流成分はほとんど電源からは供給されず、この場合にはC1,C2の両方が影響してしまいます。かといって内部抵抗を小さくすると,電源にもDC-DCコンバーターを使用しているので電源からの脈流が被測定側に侵入して測定結果に影響を与えてしまいそうなので、これでよしとしました。
消費電流が大きい理由として、まずC1,C2のESRを考えましたが、それでは数百mΩなければならない計算になりますし、C1,C2に5600uFのコンデンサを外付けしても数%消費電流が少なくなるだけだったので、高周波電流によるコンデンサの誘電損失か、インダクタの鉄損が原因ではないかと考えました。
Smithc671 | 14/04/21 06:31 | 返信
Its actually a nice and helpful piece of information. Im glad that you shared this useful information with us. Please keep us up to date like this. Thanks for sharing. affabfgccfedffcb
コメントを書く