新浜京都が2011年11月26日に書いた記事です。
書いた人: 新浜京都 | 11/11/26 11:24 | コメント(10)
ドライバー兼エレキ主任の浜です。
まずは、応援してくださった皆様に、本当に感謝いたします。そして、今まで叱咤激励してくださいましてブレーキ・配線の問題を教えてくださったり曇り止めを貸していただいたりしました、ミツバの斎藤さん、技術についてご教授いただきましたアイシンの中村さん、どうもありがとうございます。
私どもにとって現役最後の大会で完走することができまして、喜んでおります。
さて、今回の大会は、前日から朝にかけて雨が降り出しまして、若干いやな想像をしましたが、会場に入った頃には雨が上がり、よい天気となりました。
今回の大会は、去年までとは異なり、1日での開催でした。また、レギュレーションも去年のとも異なり、「加熱しての過充電が禁止」ではなく「会場内でCO2を出さなければ過充電はOK」に変わりました。ただ、私どもは、とにかく「まともに走ることが最優先」でしたので、過充電しないでのレースとしました。(自作のDC-DCコンバータを使えば過充電自体はできますが、ジェネを使わずに恒温槽は使えず、カセットコンロで加熱する自信もなかったので、今回は見送りました。)
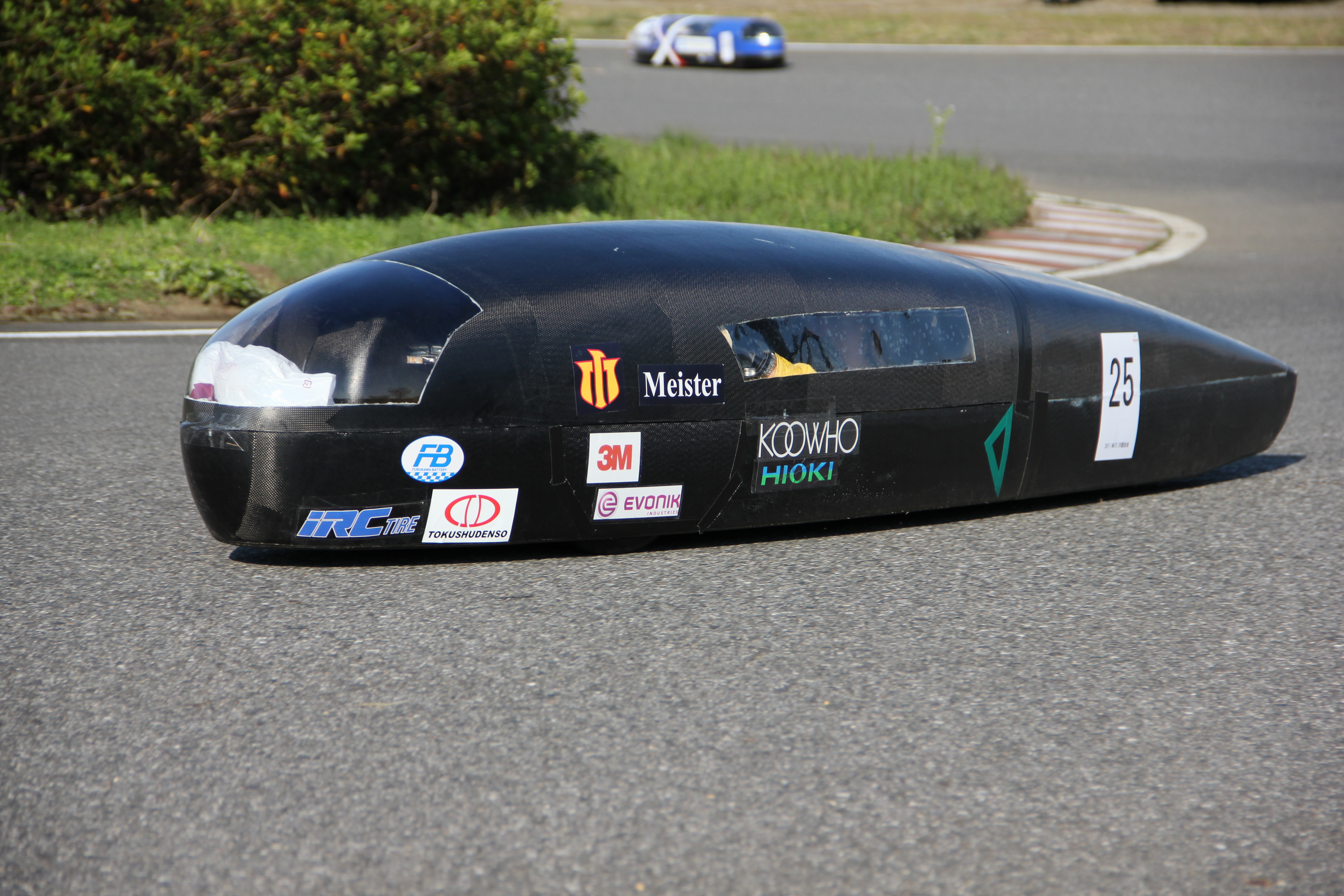
車体は、今年の車体、Gungnir(グングニル)。特電アモルファスで走りました。私は、エレキ主任でもありますから、回路的に凝ったことをするのが大好きなタチであり、キャパシタなどを載せようかとも思いましたが、「まともに走ることが最優先」ということと「バッテリに並列にするとなるとキャパシタを11本載せなければならない」といったことから非常にシンプルな回路構成でいきました。工夫したことと言えば、ブレーカーに直列にon-offスイッチを入れたことです。NATSではモーターを使わない時間が長いことに配慮しました。これは、「モーターコントローラーの消費電流(たかだか30mA程度ですが)をカットする」ということと、「下り勾配で加速と共に逆起電力が上がっていった際に回生となって効率が落ちるのを防ぐ」という意味があります。後者の理由に関してですが、無負荷回転数以上になって逆起電力が電源電圧を超えたら回生となるのはもちろん、高速時は無負荷回転数以下でもボリュームをoffにすると回生となることをモーターベンチで確認しています。これは、逆起電力がリップル(脈流)となることによるもので、無負荷回転数以下でもリップルのピークがバッテリー電圧を超えてFET寄生ダイオードを超えてクランプされて逆流するものと考えられます。
今回、「我々の代が先輩から我々へノウハウの継承が十分でなかった(先輩には失礼な言い方ですが)」ことを重く受け、2年生だけでのセットアップ練習の意味を兼ねて、もう一台Operaで出場することにしました。
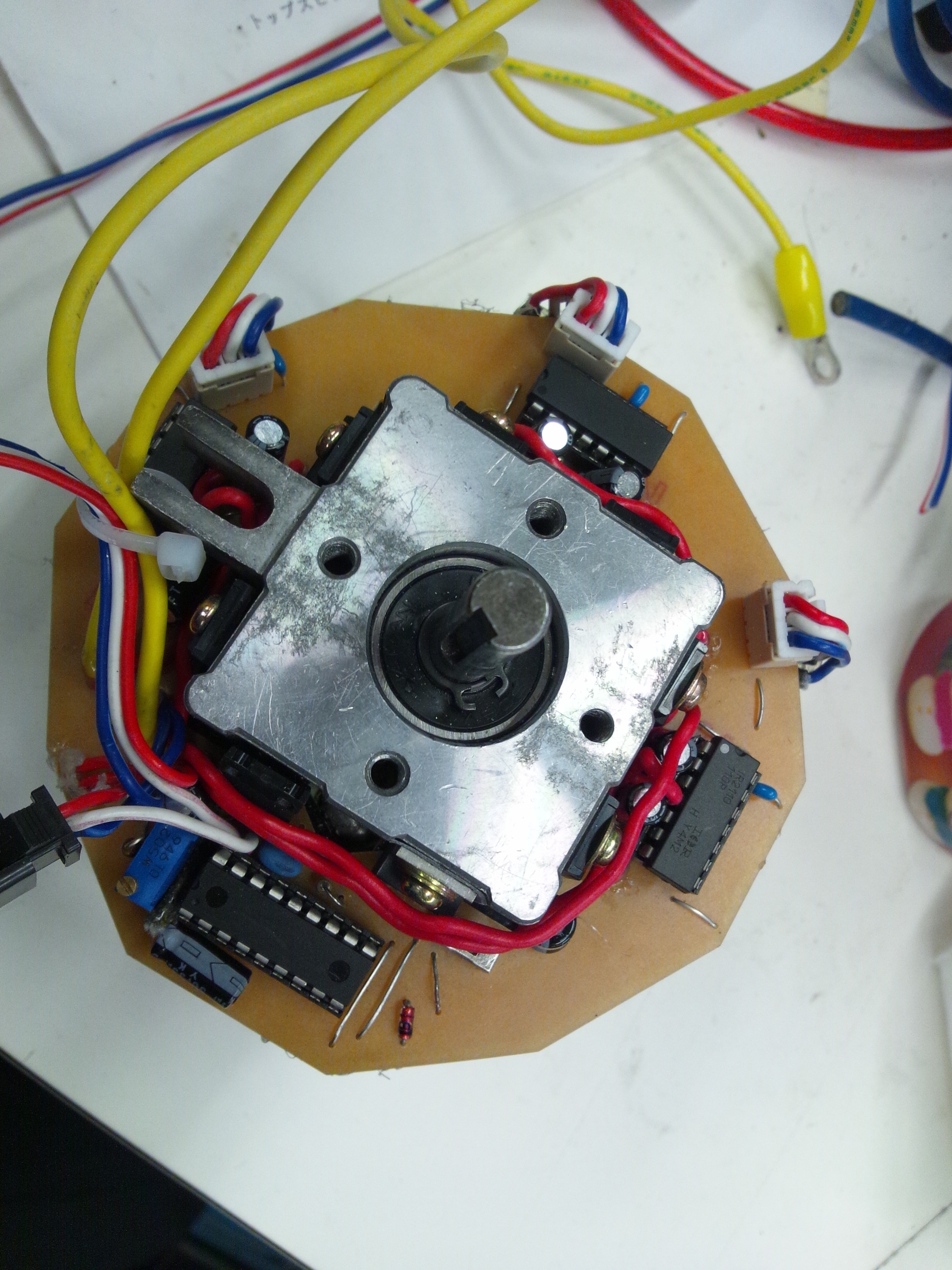
モーターは、肥後先輩がモーターコントローラーをつけて実験していたというモーター(秋田モーターだとして譲り受けました)に私の自作モーターコントローラーをつけて出場しました。このモーターコントローラーは、PICマイコン16f88とゲートドライバICだけを使って(ロジックICもCCPモジュールも一切使わずに)PWM、位相切り替えを行い、さらに電流不連続モードに対応した同期整流(実際には電流が逆流するまでの時間を入力電圧、duty比、回転数から推定させる関数を実装することが必要ですが、まだやっていません。)が可能なものです。アセンブラで厳格に作っています。細かい話はここでは割愛します。
 実際にモーターベンチで特性を測定してみると、これはなんと「秋田モーターではなくて12V用エコデンモーターだ!!」ということが分かったのです(つまりトルク定数半分、無負荷回転数2倍。波形から見ても、モーターコントローラーの誤作動などではなさそうです)。12V用モーターを24Vで使うのですから、いくらギア比を大きくしたところで効率は良くはならないのですが、「練習のための出場」ですので仕方がないのです。
実際にモーターベンチで特性を測定してみると、これはなんと「秋田モーターではなくて12V用エコデンモーターだ!!」ということが分かったのです(つまりトルク定数半分、無負荷回転数2倍。波形から見ても、モーターコントローラーの誤作動などではなさそうです)。12V用モーターを24Vで使うのですから、いくらギア比を大きくしたところで効率は良くはならないのですが、「練習のための出場」ですので仕方がないのです。
練習走行(今年は予選ではない)が始まりました!はじめてのまともな走行です。本当は学校内テストランをする予定だったのですが、代表が3週間前の申請を忘れてしまったもので・・・(こういったこともみんなで情報を共有する努力が必要!と後輩に伝えます)。ギア比を2通りで試してみようということで、高めのギア比で出発。フルボリュームで30km/hになる感じ。
 ところが、3週回ると曇りだし、何も見えない。ここで斎藤さんのお世話になり、ノウハウを教わりました(本当にありがとうございました)。ギア比を低めに変更し、自力脱出の方法を変え、最後まで走り続けました。
ところが、3週回ると曇りだし、何も見えない。ここで斎藤さんのお世話になり、ノウハウを教わりました(本当にありがとうございました)。ギア比を低めに変更し、自力脱出の方法を変え、最後まで走り続けました。
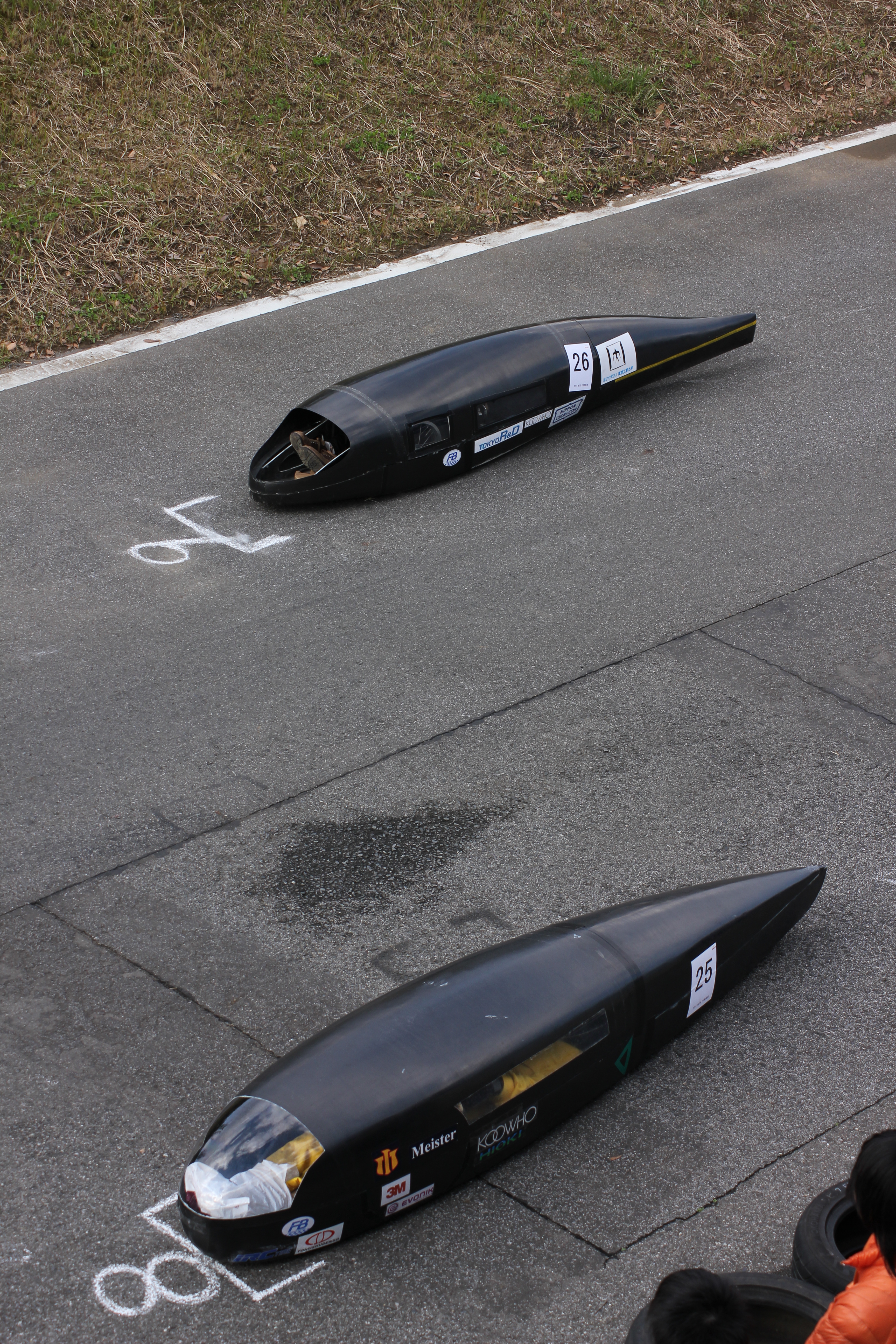
いよいよ本番です。練習走行から本番までの時間は一時間しかなく、ギア比を高めに戻すのに比較的速い作業が要求されました。スターティンググリッドでは偶然にもGungnirとOperaが横に並んでいました。
 NATSでは上り坂が重要だということで、上り坂の前でできるだけ加速し、坂ではモーター側の電流が一定になる感じで減速していきました。なお、ロガーのLapスイッチはコントロールラインではなく、坂の頂上で押すという作戦にしました。
NATSでは上り坂が重要だということで、上り坂の前でできるだけ加速し、坂ではモーター側の電流が一定になる感じで減速していきました。なお、ロガーのLapスイッチはコントロールラインではなく、坂の頂上で押すという作戦にしました。
今回は初戦ですので、基本的に時間一杯使って一定の平均Wで走ろうと考え、佐藤さんロガーのプログラムを「今走ってきたラップに関してのWh/タイム」と「今まで走ってきた全体のWh/タイム」の2つを並べて表示するように変更し、坂が下りに転じるときに平均Wが30Wとなるようにうまくコントロールするようにしました。
 レース終盤になって電池を余らせたら大変と思い、若干焦りましたが、結果的にレース終了1分前に上り坂の頂上付近で電池切れになりました。「あと数メーターがッッッ!!!」人力飛行機部門の豊さんが「あと1分!!」と言っているのが聞こえました。落ち着いてブレーキをかけ、電池の自復作用を待ってボリュームをonにしたり、できるだけバンクのイン側に行くようにハンドルを動かしたりしてなんとか下りきりました。しかし!時間切れでした。42周には届きませんでした。
レース終盤になって電池を余らせたら大変と思い、若干焦りましたが、結果的にレース終了1分前に上り坂の頂上付近で電池切れになりました。「あと数メーターがッッッ!!!」人力飛行機部門の豊さんが「あと1分!!」と言っているのが聞こえました。落ち着いてブレーキをかけ、電池の自復作用を待ってボリュームをonにしたり、できるだけバンクのイン側に行くようにハンドルを動かしたりしてなんとか下りきりました。しかし!時間切れでした。42周には届きませんでした。
 結果、41周、12位でした。ピットに戻った時、みんなが出迎えてくれました。応援してくれてどうもありがとう!私も初の運転、とても楽しかったです!!
結果、41周、12位でした。ピットに戻った時、みんなが出迎えてくれました。応援してくれてどうもありがとう!私も初の運転、とても楽しかったです!!

 ログデータによると、合計電力量は62.45Wh。例年と比べると低いですが、過充電していないのでそんなものでしょうか?60Whとして計算していたので、ほぼ計算通りです。ただ、電池がへたってきた終盤に焦ることになってしまったので、もう少し前倒しの運転にすべきだったとも考えています。
ログデータによると、合計電力量は62.45Wh。例年と比べると低いですが、過充電していないのでそんなものでしょうか?60Whとして計算していたので、ほぼ計算通りです。ただ、電池がへたってきた終盤に焦ることになってしまったので、もう少し前倒しの運転にすべきだったとも考えています。
レース全体で、2回他車と接触してしまいました。2回目はヘアピンで、こちらがTTDCさんの青い方の車体をインで追い越す形になってしまい、側面に衝突し、スピンさせてしまいました。申し訳ありませんでした。
Operaの方はというと、ロガーの電流値がおかしいだとか、ギアが外れるといった様々な問題に見舞われ、1時間を過ぎたあたりで途中で止まっているのをGungnirの中から何度も見ました。
今回は(というか近年はいつもそうなってしまっているのですが・・・)、まともに(アッパーを閉めた状態で)テストランせずにいきなり本番に突入するということで、正直不安でした。そこで電気系のトラブルを絶対に出したくない、ということと、どの場所に来たらどのロガーボタンを何回押すのかという練習をするため、私が数ヶ月前に開発した「モーターベンチ・モーターベンチ制御システム」
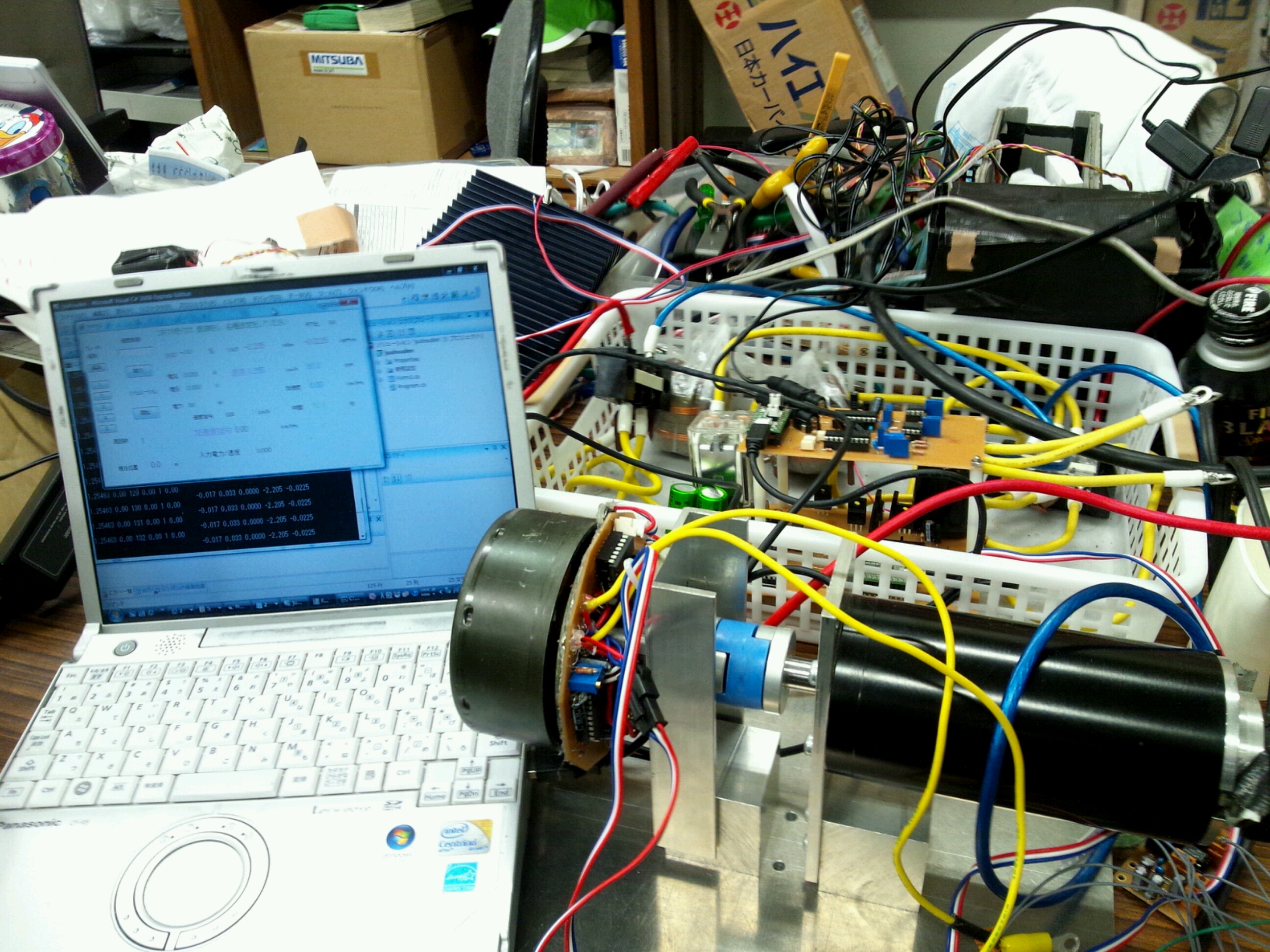 を使って、本番の再現シミュレーションをしました。車体に乗ってアッパーを閉めて、モーターだけモーターベンチに乗せている感じです。詳しいことはここでは割愛しますが、アクセルモード・ブレーキモードが連続制御で速度指令に追随するように運転できるため、NATSの中西さんからいただいたコースエレベーションと講習会資料をもとにした転がり抵抗、空気抵抗を入力し、シミュレーションをしました。実車からデータをとったわけではないので今回の試験では完全なシミュレーションはできませんでしたが、ドライバー(私)が慣れるという意味で重要な意義があったと考えています。実際に、ロガーで測定する電流は、PWMの前側のバッテリー電流なわけであり、坂を上る際にモーター電流を一定にした方が良いという観点からは、ボリュームをどんな速度で戻してゆくのかといったことを体に身につけさせる必要があると考えています。ですので、モーターベンチでPCに表示される出力トルク(これはモーター電流に直接比例しているはず)
を使って、本番の再現シミュレーションをしました。車体に乗ってアッパーを閉めて、モーターだけモーターベンチに乗せている感じです。詳しいことはここでは割愛しますが、アクセルモード・ブレーキモードが連続制御で速度指令に追随するように運転できるため、NATSの中西さんからいただいたコースエレベーションと講習会資料をもとにした転がり抵抗、空気抵抗を入力し、シミュレーションをしました。実車からデータをとったわけではないので今回の試験では完全なシミュレーションはできませんでしたが、ドライバー(私)が慣れるという意味で重要な意義があったと考えています。実際に、ロガーで測定する電流は、PWMの前側のバッテリー電流なわけであり、坂を上る際にモーター電流を一定にした方が良いという観点からは、ボリュームをどんな速度で戻してゆくのかといったことを体に身につけさせる必要があると考えています。ですので、モーターベンチでPCに表示される出力トルク(これはモーター電流に直接比例しているはず)
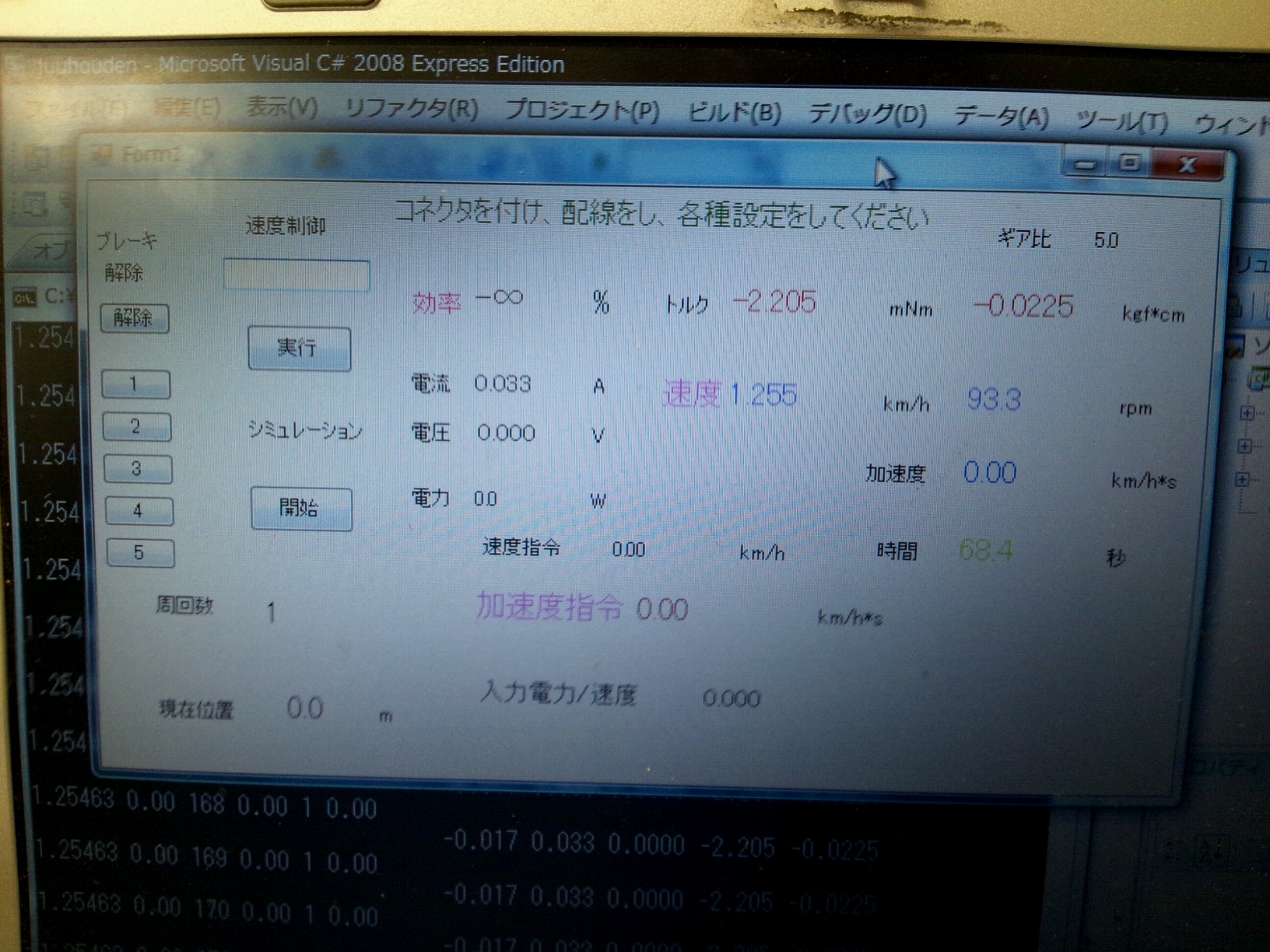 を見ながら、それが一定になるようにするにはどうすればいいのか、練習しました。この試験では、開始直後に、ロガーのLCDが断線して、まともに映らなくなりました。これを修理して本番に臨んだわけです。もしこれが本番で起こっていたら・・・今回のようなエネマネはできなかったと思います。
を見ながら、それが一定になるようにするにはどうすればいいのか、練習しました。この試験では、開始直後に、ロガーのLCDが断線して、まともに映らなくなりました。これを修理して本番に臨んだわけです。もしこれが本番で起こっていたら・・・今回のようなエネマネはできなかったと思います。
テストランがなかなかできないなかで試験をするうえで、できるだけ本番と同じ状況を作りだすことが必要で、ツナギもたびぐつもグローブも着けた上で実施するわけです。そうすると、ボタンが押しにくいとか、ボリュームを回した時に隣のスイッチを触ってしまうとか、いろいろなマイナーな問題が出てくるわけです。
また、Operaが出場することを受け、急遽自作モーターコントローラーの耐久試験をしました。定格電流で2時間の試験を何度かやりました。「本番で火が出た」となっては大変ですから!よくありがちなパターンは、「ちゃんとつながっているところはつながっていて、つながっていないところはつながってなく、制御ロジックもあっていて、無負荷ではちゃんと回っている」のに、「本番では火が出た。」というもの。大電流でノイズが発生すると、スタティックな回路設計では駄目なのです。細かいことは割愛します。結果として、本番でトラブルを起こさず、良かったです。
繰り返しになりますが、今まで支えてくださった方、本当にありがとうございます!!また、ノウハウ不足とか、炉から自作しなければならなかったとか、いろんな逆境の中にあったのに、さまざまな新しいことを取り入れた新車を作り上げ(もちろん私も手伝いましたが)、兵庫でさんざんなことになりながらも心折れずに(折れてたのかな?)改良を重ねてくれた、車班の2人には本当に感謝します。どうも、ありがとう!!
ちなみに、今日はMeister全体の祝賀会なので、こんなかっこうをしてたりします。


{kind=link}
コメント(10)
はやし | 11/11/27 21:36 | 返信
lucciolaの時のOBです。
完走おめでとう!よく準備して臨んだ様子が伝わってきます。
炉の自作までしていたとは、知りませんでした。
飛行機のOB | 11/11/27 23:11 | 返信
完走できてよかったですね!
それと,学生のうちに『エンジニアリングは積み重ね』だっていうこと知ることが出来たのは,個人的にすごく大きいと思いますよ!
記録に残すことと伝えることを怠ったら,たとえ優勝できたって自己満足で終わってしまうからね。(でもその分,後世の人は,よりレベルの高い試行錯誤をしなきゃならないけれど。。。)
中村@first_step | 11/11/28 00:54 | 返信
おつかれさまです~
細かく記事にしてるので良い機会ですから少しだけ検証してみましょうか?
「モーターの電源線を有接点のスイッチで遮断する」
記事の通り二つの効能がありますね。
「回生の発生を防止する」と言う効能は他の方法でも実現できますが、制御回路の消費電力を遮断するにはコントローラーの改造を伴わない限り、この方法になります。
ざっくり計算、、、
負荷率が35%だと仮定すると省略できるのが残りの65%,,
0.03A*24V*0.65*2h=0.936Wh
かなり効果がありそうですね。
ただし、、、、
3A/負荷率0.35=0.43A
超ざっくり計算するとONの時には大体これくらいの電流が流れているはずです。
なので、、
0.43A^2*0.07Ω*0.35*2h=0.9Wh
スイッチや配線の増加による抵抗値の増分が0.07Ωを超えるとちゃらになります。
実際には重量の増加分も引かなければいけません。
70mΩってかなり手を抜かない限り大丈夫そうですね(笑)
↑テスターで抵抗値計っても誤差大きいですから、10Aとか大電流流して電圧降下計るのが吉です。
スイッチや配線がどれくらいの損失を生み出しているのか一度は計っておくと良いと思います。
リクエストがあれば続きの検証もしますよ(笑)
中村@first_step | 11/11/28 00:57 | 返信
>3A/負荷率0.35=0.43A
がはは
1.5A/負荷率0.35=0.43A
ですね
他にもまちがいあるかもね(^^;;
新浜京都 | 11/11/28 17:55 | 返信
検証していただきまして、ありがとうございます!
なるほど。30mAや配線抵抗は、意外と大きく効いてくるのですね!!
回生の発生を防ぐ他の方法とは、クラッチとかでしょうか?
ミツバ齋藤 | 11/11/28 18:40 | 返信
何はともあれ完走おめでとう御座います。
NATSではうちも今は回生は使っていませんがDDなのでコア抜きを採用しています。
減速モーターを使用しているチームではワンウェイクラッチを使っているところが多いです。
制御系の電源OFFはうちも昔はやっていましたが、今は省エネコントトーラー(7mA)で運転手がメンドウなのでやってません。
練習走行時のスクリーンの曇りは、あの状況であれば兵庫以上に厳しい事は容易に想像がつきましたが、これも経験不足って事です。
来年のメンバーに良~く引き継ぎ、同じ苦労をさせないようにしましょう。
毎年新車を作る事がMUSTなのかどうかは知りませんが、まずは旧車でも良いので出られる大会に出場する事です。
3月にはタイの大会がありますので参加検討したらどうでしょうか?前にも東工大は出場しているので無理な相談ではないでしょう。。。?
中村 | 11/11/28 23:44 | 返信
がは~
0.43Aじゃなくて4.3Aですね
あまりいいかげんだと怒られそうです笑
回生防止には回転の遮断、
磁束の遮断、低減
動力線の遮断やダイオード回路の挿入などでしょう
うちの場合は最後のダイオード回路の挿入です
ところでモーターコイルに流れる電流の一定化で得られるもの、損失の低減は、その操作によって発生する損失より大きいのでしょうか?
ギリギリのような気がします、、、、
ミツバ | 11/11/29 13:00 | 返信
コア抜きの当初の目的はソーラーカーでも同様ですが、可変界磁と呼ばれる通り磁力を変えてモーターの特性を変更する事であって惰走は副産物です。
よって抜くだけではなく、ラチェット機構で数段階にストップ出来ます。ソーラーカーでは電気が余っている?ので電動式で制御しています。
電気的な遮断だと磁力的な損失は防げませんが、コアを抜いてしまえば中村さんの言うところの「磁束の遮断、低減」になります。
新浜京都からミツバ齋藤への返信 | 11/11/29 16:42 | 返信
コメントどうもありがとうございます。
私たちのサークルMeisterは、「ものつくりサークル」として活動していますので、それぞれの代で一つのものをつくるというやり方でやっております。ただ、近年のエコノムーブ部門は人手不足だったりとか、作業開始の時期が遅かったりとか、何かとネガティブな方向に向かってきてしまったのも事実です。(『去年と違って今年は秋田大会までに完成しよう』といっていたのに、結局完成したのがこの前ということになってしまいました。)
これらのことを踏まえ、次の代は、兵庫に行く前から車体の製作を始めていました。
タイ大会に行けるかどうか、今すぐには結論が出せませんが、Gungnirは比較的大きめに作っている車体ですので、新車の完成を待たず、大会に出場するという方向でも考えてゆきたいと思っております。
ミツバ齋藤 | 11/11/30 12:11 | 返信
「ものつくり」という言葉の捕らえ方次第のような気もしますが、現在は高校生チームでさえ、毎年車両を製作しているチームはほとんどいなくなりました。
昔は作る技術の伝承目的で似た様な車両を毎年製作しているチームも多数ありましたが、今は同じ先生が指導している限りは、それ以上にやるべき事があるという事を優先しているようです(先生が転勤になるリスクはありますが)。
Misterの場合には先生の顔も見た事がなく、学生が入れ替わってしまうと車両が永久に作れなくなってしまいそうですが、聞けば教えてくれる業界ですから、そんな事はないです。
活動してわかったと思いますが、1年(秋田を考えると半年)で車を作るのは非常に困難です。
また、まず車を作るには「コンセプト」が大切。その目的に沿って車両を考えなければ作るダケになって意味がなくなります。今年の新車のコンセプトは何だったのでしょうか?私には見た目ではわかりませんでした。
(数年前のDAWの様に前方投影面積削減に目標を絞った等)
既に製作開始しているという車両の狙いはなんでしょうか?
とか立派な事を言っているうちのチームも新車の計画は現在ありません。今年の秋田でBIZONが優勝していれば、あのコンセプトで行こうと思っていたのですが、タキオン以外にまだ実績なく本当に良いのかがわからない。。。つばさ54号は違ったコンセプトですし。
ロガーの時にも書きましたが、作る事が目的であって、レースの結果は二の次という事であれば結構ですが、それではやっている方としても面白くないでしょう。
レースへの参加もブッツケ本番では上手く行かない事は今年の2回のレースで身にしみた事と思います。
タイでお会いしましょう。
長文失礼しました。
コメントを書く