Home
レポート
電装・操縦班日記
2014年6月 1日の記事
R.Yamada
が2014年6月 1日に書いた記事です。
5/30~31 5thTF 電装・操舵系ログ
書いた人:
R.Yamada
|
14/06/01 03:01
|
コメント(0)
先ほど編集途中のものがUPされてしまったようです。すいません。
5thTFお疲れ様でした。
ロッドの破断が衝撃的過ぎた操舵担当です。
反省点。気になるところだけ。
・気速計
超音波式気速計を搭載。
前回TFのログを基にゲイン調整を実施。
値の妥当性については全体設計に確認が必要。
今年は超音波式を搭載することにします。
現状のものは試作機のためサイズが大きい上フェアリングもついていませんが、本番用はその辺り改善されると思います。
・高度計
現在フェアリングの底に搭載されている高度計は、地上に向けて超音波を出し、その反射波がセンサに到達するまでの経過時間から高度を算出するもの。
そのため草地に着地した際に超音波の送受信部に土が付くと正確な値が測定できなくなる。
実際に2本目長距離ではそれが起こり不正確な値が出ている。
これは本番琵琶湖上では想定されないためあまり問題視する必要もないだろうが、TFで草地へ侵入した際は高度計に異常がないか確認が必要。
・GPS
2本目長距離途中で突如衛星との通信が切断されていた模様。
切断は飛行が始まってすぐなので保持の際に誰かの手でモジュールが覆われてしまったためという可能性は考えられない。
尚、気づいてモジュールの電源を入れ直すとすぐに通信が回復した。
複数のモジュールを搭載する、通信の切断を確認したらロガーが強制的にモジュールの再起動を行うなどの工夫が必要かもしれない。
・操舵
2本目長距離の際に草地に着地し、車輪が草地に引っかかったのか機体が前のめりになり、テール桁や尾翼が上下に大きく振られた。
その際に操舵機能のロッドが引っ張りに耐えられずに破断。
確認したところカーボンパイプとロッドエンドを固定していたφ1のアルミ棒がせん断されていた。
破断のきっかけは今日の2本目長距離だがこれまでのダメージが蓄積されていた可能性もある。
アルミ棒を鉄等強い材料に変更して作り直す予定。
以下、計器・操舵・GPSログ
風向風速は計測係から提供してもらったものです。
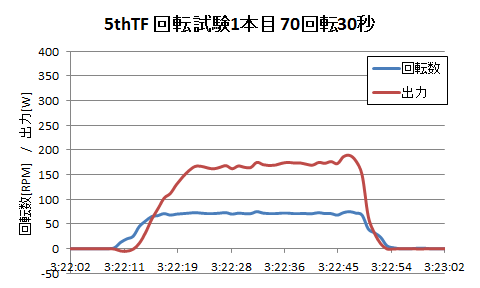
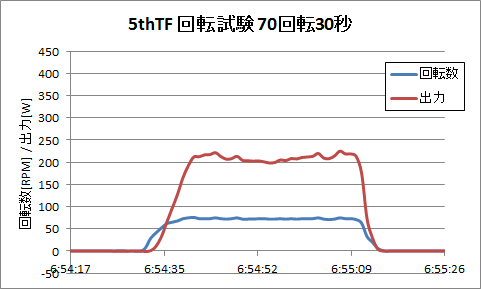
<回転試験>
全体設計から要望があったので回転試験分もグラフにしました。
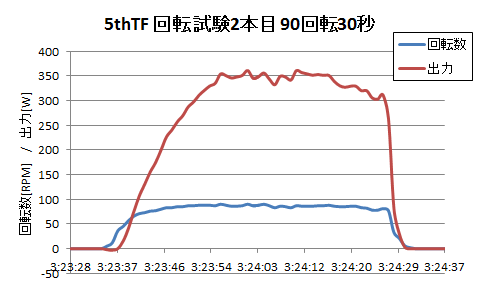
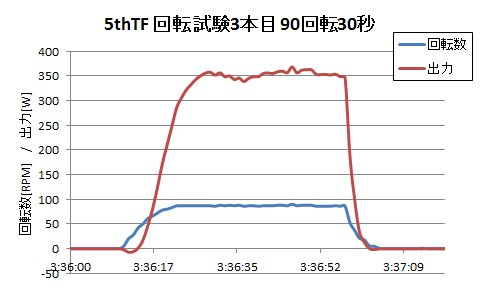
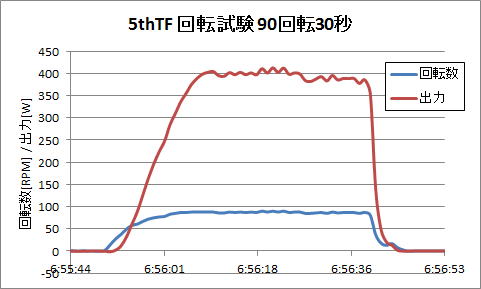
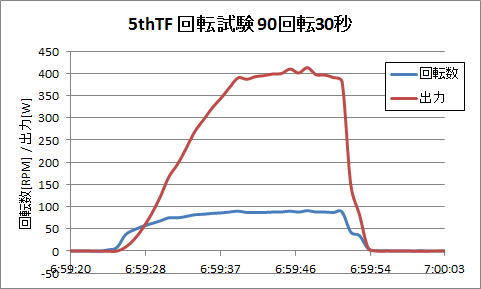
重心測定後の回転試験(70回転30秒*1,90回転30秒*2)です。
普段より出力が高めな気もしますが・・・
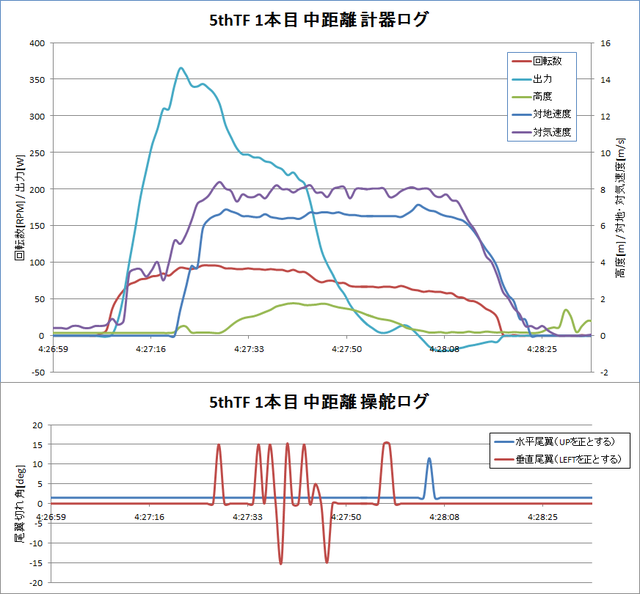
<1本目 中距離>
風向風速 前:無風 後:無風
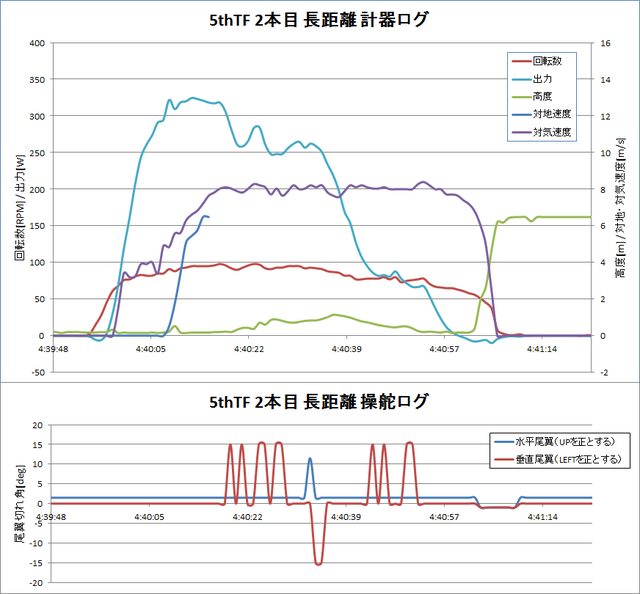
<2本目 長距離>
風向風速 前:無風 後:無風
上で書いた通り途中でGPSが途切れてしまっています。
また草地に突っ込んだ影響で最後の方高度計が異常値出しています。
<回転試験>
飛行の際に異音が観測された後の回転試験、ラスト3回分です。
ギアボがきつめだった?らしいですが、出力400[W]まで達しています。
来週に向けてロッドは最優先で直します。ロガー再履も...回路ホルダーも...温度計も...ダウンリンクも...舵角表示機も...
以上です。
コメント(0)
この記事へのコメントはありません
コメントを書く
お名前
メール
コメント
Copyright © 1992-2010 Meister. All rights reserved. E-mail :
webmaster@meister.ne.jp


コメント(0)
この記事へのコメントはありません
コメントを書く