Home
レポート
電装・操縦班日記
2014年5月25日の記事
R.Yamada
が2014年5月25日に書いた記事です。
5/23~24 4thTF 電装・操舵系ログ
書いた人:
R.Yamada
|
14/05/25 02:24
|
コメント(0)
4thTFお疲れ様でした。
久しぶりに走ったら心肺機能の衰えに気づいてしまった操舵担当です。
始めに今回のTFの電操班の反省点を。
・回転計
動作は問題なし。
取り付けの際にドライブシャフトとの干渉が起こることがあるようなので、取り付け用の台と遮光用の覆いを早めに作りましょう。
・気速計
今回、超音波式気速計を試験的に搭載。
向かい風の状況で対地速度よりも測定値が低いことから測定値の絶対値の信頼性は怪しいが、気速の上下に対して良い応答を示しているためにキャリブレーションを行えばいい感じになるかも。
尚、従来のロータリーエンコーダ式と比較して低い気速に対しても反応する模様。
・高度計
プログラムの修正により良い感じになってきたように見える。
・出力計
動作は問題なし。
設計出力に一致する値が得られている模様。
各フライトの後半では出力が一致に落ちるがこれは減速指示後か?(要確認)。
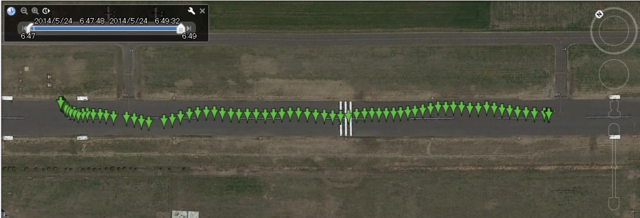
・GPS
動作は問題なし。
11本目の最後に45秒ほど通信が途切れている箇所があったが保持の際に誰かがGPSモジュールに触れたのかも?
上田と前田の接合部あたりについているGPSモジュールを手で覆ってしまうと衛星との通信に支障をきたす可能性があるので触らないように注意してください。
・操舵
尾翼の動作は問題なし。
全体設計に煽られたため今回から操舵ログの記録を導入し、尾翼の切れ角と全体設計との間で懸案となっていたサーボモータの温度上昇と電源電圧変動についてログを取ってみた。
以下、計器・操舵・GPSログです。
8~11本目の長距離のみ抜粋して掲載します。
風向風速は計測係から提供してもらったものです。(風向12時が向かい風を表す)
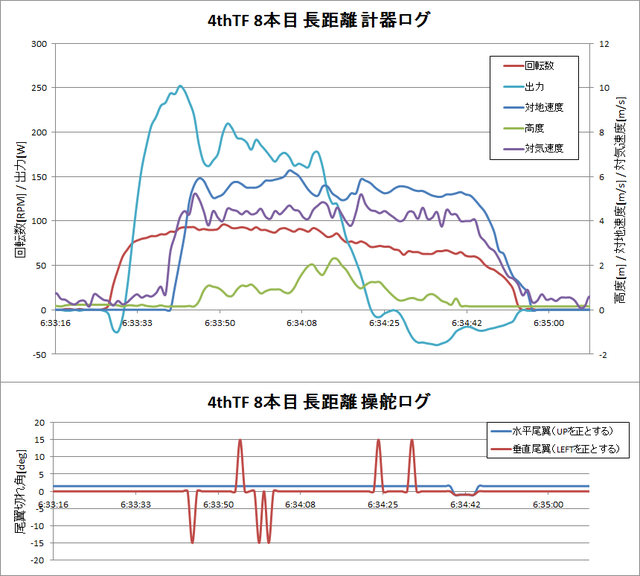
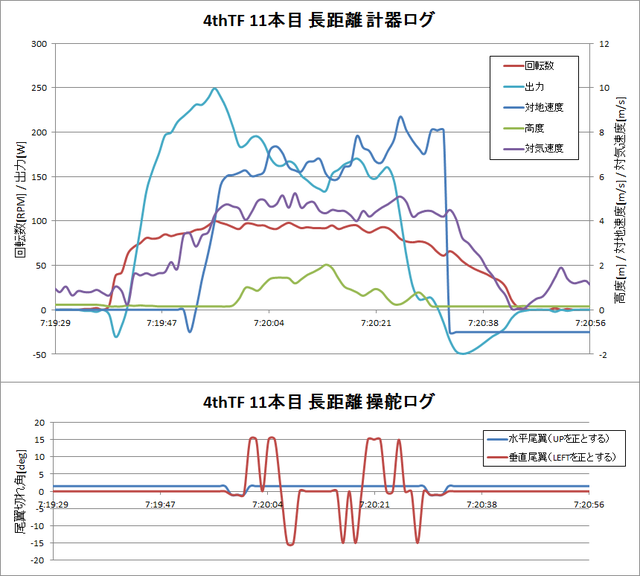
先日OB様とお話しする機会がありまして、一昨年はグラフの縦軸を2軸にして回転数・出力・高度・速度を1枚のグラフで表していたとのことを伺ったので試してみました。
回転数・出力は左側の縦軸、高度・対地速度・対気速度は右側の縦軸で表示されています。
操舵ログの尾翼切れ角は、水平尾翼はアップを正、垂直尾翼はレフトを正として表示しています。
<8本目 長距離>
風向風速 前:12時1.9[m/s] 後:1時1.7[m/s]
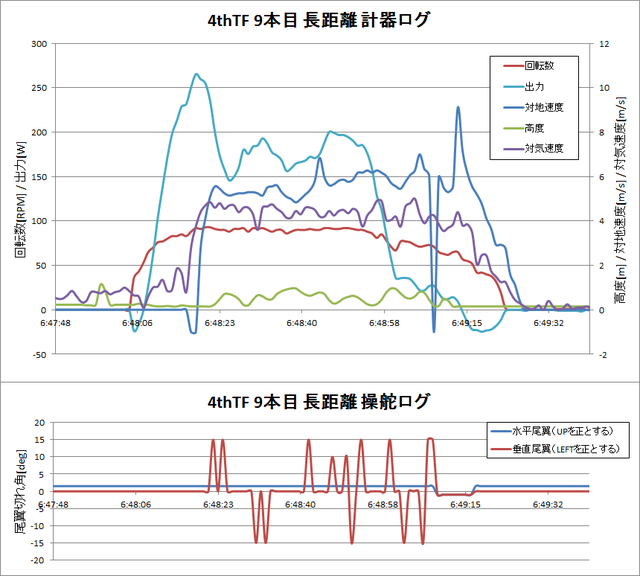
<9本目 長距離>
風向風速 前:12時1.8[m/s] 後:11時1.1[m/s]
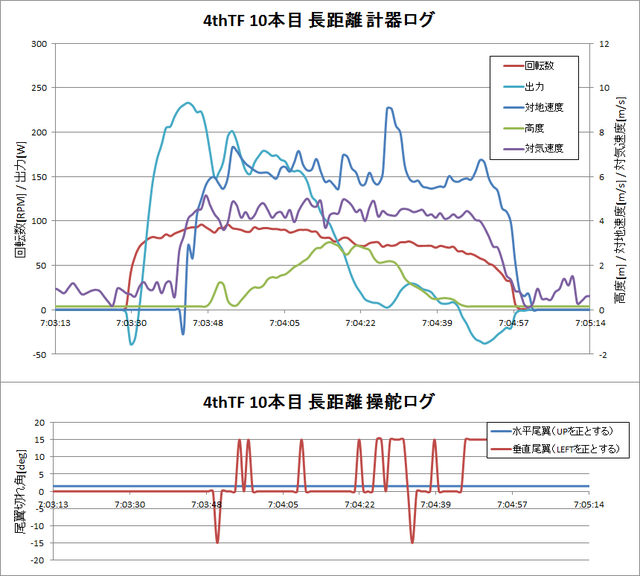
<10本目 長距離>
風向風速 前:12時1.8[m/s] 後:1時1.2[m/s]
<11本目 長距離>
風向風速 前:データなし 後:2時1.0[m/s]
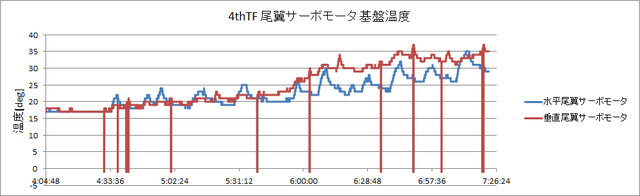
<尾翼サーボモータ 基盤温度ログ>
飛行時の負荷や日の出後の周囲の温度上昇によってサーボモータの温度も上がるようですが、特に危険な水準に達しているわけではなさそうです。
なお、たまに値がマイナスまで落ちているのは通信エラー時です。
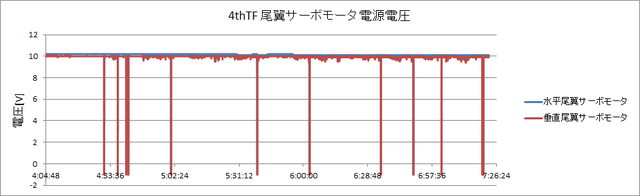
<尾翼サーボモータ 電源電圧ログ>
尾翼サーボモータの電源にはEneloopPro8本を使用しています。尾翼取付直後(1:00くらい)からずっと尾翼の電源は入れたままなのですが電源は十分な電圧を維持してくれているようです。
最後に。
全体設計に、飛行中の桁の温度を測るのと、飛行中に回転数等の情報を無線で飛ばして外部(琵琶湖でのボート上など)でも参照できるようにする(ダウンリンク?)のを煽られたので整備を進めていきます。
以上です。
コメント(0)
この記事へのコメントはありません
コメントを書く
お名前
メール
コメント
Copyright © 1992-2010 Meister. All rights reserved. E-mail :
webmaster@meister.ne.jp



コメント(0)
この記事へのコメントはありません
コメントを書く