Home
レポート
電装・操縦班日記
2014年5月11日の記事
R.Yamada
が2014年5月11日に書いた記事です。
5/11 サーボモータ特性実験
書いた人:
R.Yamada
|
14/05/11 18:53
|
コメント(0)
操舵担当です。
ペラのCPP担当の提案で可変ピッチプロペラに使っているサーボモータの特性実験をやってみました。
可変ピッチでサーボを使っていると負荷が大きかったり機構が引っかかったりで結構な電流が流れ、サーボが発熱し挙句の果てに保護機能が働いて自動でパワーダウンするという始末です。
そこでサーボのトルク・電流・位置偏差についての特性を調べてみようという企画です。
そうすればサーボにどのくらいのトルクがかかっているかが推定できるようになりますからね。
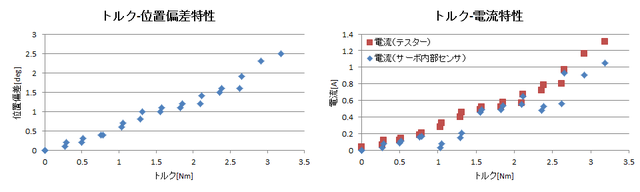
実験はクランプで固定したサーボにカーボン製のアームをつけて、ペットボトルのおもりをかけたときの電流値と位置偏差を調べました。
電流値はテスターとサーボ内部のセンサの2通りで測定しました。
位置偏差はマイコンから送信した目標位置とサーボ内部のセンサで測定した現在位置から求めました。尚、過渡状態ではなく定常状態に入ってからの位置偏差です。
トルク-電流特性、トルク-位置偏差特性を以下に示します。
サーボ内部の電流センサは何だか気まぐれですね。
おおよそはテスターの値に追従してますが稀に妙に低い値が出たり・・・
サーボのデータシートにも、この値はあくまで目安として...的なことが書いてありましたしこんなもんなんですかね。
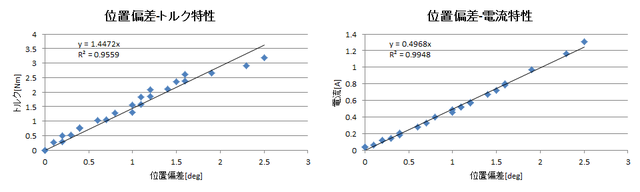
それはさておきサーボのフィードバック系は位置偏差や速度偏差を元に電流電圧の出力を決定しているのでしょうから、定常状態では位置偏差から電流値やトルクを大雑把に推定することなら出来そうです。(当然ある瞬間の位置偏差から電流値とトルクを一意に決定することは出来ません。あくまで"大雑把に推定"です。)
以上です。
コメント(0)
この記事へのコメントはありません
コメントを書く
お名前
メール
コメント
Copyright © 1992-2010 Meister. All rights reserved. E-mail :
webmaster@meister.ne.jp

コメント(0)
この記事へのコメントはありません
コメントを書く