
豊田大会報告
まず先にお詫び申し上げます。
製作が大変すぎまして、写真があまりありません!
分かりにくくてすみません。大会の写真はしっかりあるのでそれを見て色々想像してください。
2004DD計画の紹介

fig1 : Direct Drive Motor
2004EMP(2004年度 Meister Econo Move Project)の掲げる目標の一つに、DDM(Direct Drive Motor)の製作があります。DDMとは、fig1にあるような、モータがタイヤに直に付いているものです。近年、エコノムーブ界でも一部(お金持ちの間?)で普及し始めています。DDMの利点としては、「省スペース・伝達ロスが0(ゼロ)・駆動周りがシンプルになる」といったところです。昨年の経験と、チーム内にモータ製作を強く希望するメンバ−がいたことから、このDDMを製作する運びとなりました。
(注:去年の経験とは、伝達効率の向上の難しさを痛感したことです。)
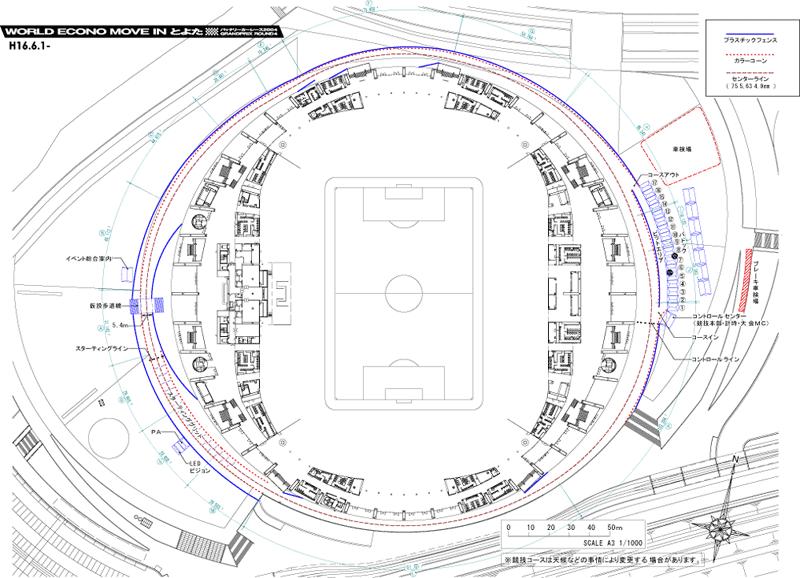
fig2 : 豊田スタジアム
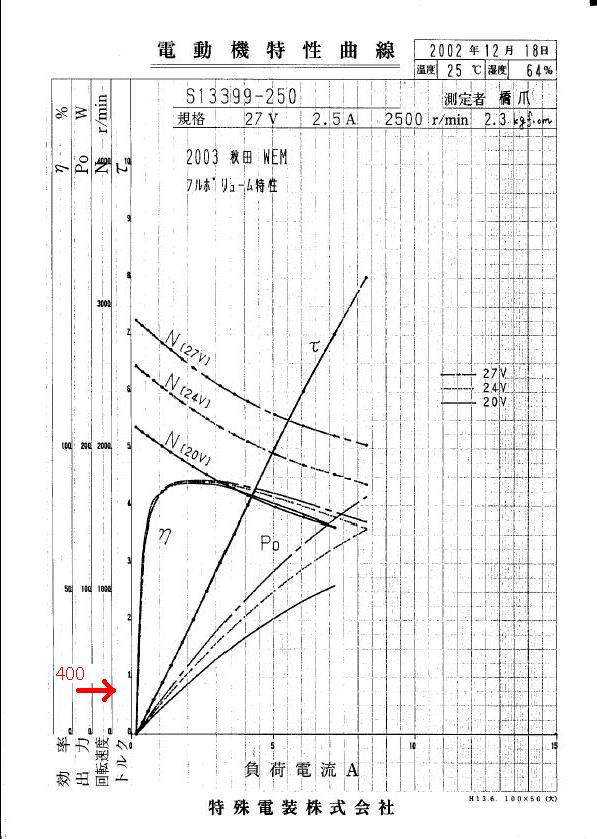
fig3 : 電動機特性曲線
豊田大会は、愛知県豊田市にある豊田スタジアムの周りのオーバルなコース(fig2)を周回するという、一見とても単純なものであります。菅生とは異なり勾配はほとんどなく、ほぼ平地です。よって、車速はほぼ一定にして走るのが最も省エネになります。加速に必要なエネルギーは馬鹿にならないからです。バッテリー的にも、一定電流を取り出すほうが結果的に多くのエネルギーを取り出すことが出来ます。このような走行条件の下では、DDMの特性が生きます。
一般的には、モータは高速回転域に最高効率点があります(fig3)。しかしエコノムーブの車輪の回転数は高々400rpmですので、普通はモータの出力をチェーンなどで減速して駆動します。ここで、DDMは回転数的にとても不利な状況にあります。しかし、低速回転域でも効率よくまた高トルクを発揮できるよう設計できれば、先に述べたような利点を得ることが出来ます。さらに、加速をする(トルクを必要とする)場面が少ない用途においては、DDMの不利な条件が減ります。よって、定速走行が特徴のコースではDDMが生きるのです。
以上のような理由から、豊田は自作DDMで勝負することになりました。
菅生後の製作
菅生を終えた時点で、豊田のために用意しなければならない部品はDDMだけでした。私たちは、もともと秋田大会で自作DDMを投入する予定でしたが、車体製作で飽和していたためDDMの開発に費やす時間はありませんでした。菅生大会が終わり、1年近くかけて吉井君(チームエレキ)が設計したモータコントローラが完成に近づく中、DDMの機械部品の設計がようやく仕上がり(色々なわけがあります)製作が始まりました。それからは連日の工場作業、出発前日の21時にようやく機械部品がそろいました。予定より3日遅れての完成でした。大きい上に精度が要求されたために予想外の加工時間を要したためでした。
さて、このようにしてやっとの思いで完成したDDMハウジングですが、いざスポークを組もうとすると・・・「組めない!」。相当焦りました。もともとの設計では、スポークを6本組み(一般的な自転車のスポークの編み方です。)で組む予定でしたが、この方法ではスポークの長さが短すぎたため、後輪(駆動輪)が組めないことになります。2週間弱かけて作ったハウジングが使えない?!一同真っ青でしたが、急遽4本組み見挑戦!なんとこれでうまくでっち上がってしまいました。結局設計とは違ったものになりましたが結果オーライで何とか後輪は完成。この遅れのために、予定していたモータの動作テスト・調整を行うことは出来ず、しょうがないので全ての荷物を積み込み豊田へ出発しました。予定より4時間遅れての出発でした。菅生を終えて、「あれ以上大変なことは無いだろうもう出発が遅れることはないだろう」と8月末には高をくくっていましたが、やはり新しい部品を製作する場合は出発は遅れるようです。ほぼノンストップで豊田に向かい、約3時間半で現地へ到着しました。
予選
豊田大会は、公式予選においてトップの周回数の半数以下の場合、EOJクラス(1時間レース)へ格下げされるという独自のレギュレーションがあります。菅生でのこともあり、リベンジの場である豊田大会においてEOJへ格下げされるというようなことは絶対にあってはならないことでありました。チーム一同、未だ動かしたことのないモータで果たしてそれが出来るのだろうかという不安を抱えていました。レース開始の14時半に向けて着々とセットアップをこなし、いざモータの回転試験。しかし、、、「回らない」。そうこうしているうちにまさかのコントローラの故障。FETが焼けてしまいました。予選までに治すことは不可能ということで、急遽秋田大会を走った状態にセットアップしなおし予選を迎えました。(モータについては別途詳細がありますのでそちらも御覧ください。)
秋田大会での走行データから、あらかじめ適正な減速比を予測していましたので、あとは電池の電圧変化(電池残量の目安になります)を見ながら、ドライバーの運転に任せて走るだけでした(平坦な道を走るという点で、秋田と豊田は類似しているためです。更に言えば、路面の悪さも同様に良くないです。)。エントリーが早かったためにグリットは6番!そうそうたる面々のなかにlucciolaはいました。スタートの合図とともにいっせいに各チームが出走しますが、豊田のコースは狭いことで有名でして、初めは様子見のために多くのチームが徐行します。しかし、われらがlucciolaはドライバー羽賀君に操られ一気にトップへ躍り出ました。すると各チームそうはさせるかと一気にスピードを出し始め、一周して帰ってくる頃にはlucciolaは3位になっていました。(ドライバーの話によると、アクセル全開で走っていなかったためにすぐに抜かれたとのことでした。)

fig4 : 加湿充電
その後は想定よりもやや速めのラップを刻みながら順調に周回を重ねましたが、途中で帰ってくる気配がなくなり、いきなりのペースダウン。バラスト(ドライバー重量を70kgにするための錘)が振動により移動してタイヤとカウルの間に挟まり左前輪がロックして止ってしまったのでした。奇跡的にパンクもしておらず、ドライバーが自力で復帰しその後も順調に走り続けました。バッテリーを加温充電(fig4)できなかったためか終盤やや早めに速度が落ちてきましたが、なんとか止まることなく走行を続けチェッカーを受けました。初めての完走でした(注:加温充電とは、電池を暖めながら充電することです。こうすると電池の容量がやや上がるといわれています。)。
走り終わってみると、結果は78周、トラブルがなく、充電ができていれば80週は超えてたことが予想されたのでやや残念でした。また、トップが100週を走っていることから、トップとの差を改めて痛感しました。しかし、大学生内では1位(工業高校にはめちゃ負けてますが)<予選結果>
決勝


fig5 : コントローラー復活 と fig6 : 雨対策
予選が終わり、ひどい雨に見舞われながら、会場より13kmほど離れた山の中の宿に舞台を移し、決勝に向けての必死の作業を始めました。吉井君はコントローラを復活させ(fig5)、新たに1年生を加えた他のメンバーは、予想される雨に対する処置をlucciolaに施しました(fig6)。午前5時ごろ、ようやくコントローラが生き返り待ちに待った回転試験(fig7、8)。ボリュームをひねるとモータは想像よりも滑らかにしっかりと回り、歓声が上がりました。Video(注:5.3MB)
ようやく豊田仕様になったlucciolaを積み込み、再びレース会場へ戻ってセットアップを続けると、再びコントローラのFETが焼けてしまい修理が余儀なくなりました。毎回同じFETが焼けてしまうことから、どうやらコントローラの構造自体に問題があるようでした。しかし、いまから回路を組みなおすことは不可能なため、とりあえず素子を付け替える作業に移り、ここからは時間との勝負となりました。
決勝開始1時間前、再びFETが焼け、もうDDMは無理かという空気が流れ始めていましたが、吉井君の「最後のチャンスをくれ」という言葉のもとに、ピットスタートをしてでもこのDDMで決勝を走ることにしました。
決勝開始後30分、lucciolaはその全てがMeisterによって作られた体で走り出しました。時間はもう1時間と少し、ボリューム全開で走るしかありませんでした。その走りは、初めは今までのごたごたを感じさせないもので、最高ラップ1:10.997は予選よりも7秒速く、そんな爽快な走りに今までの苦労が報われる感じがしました。
しかし、このひとときも長くは続かず、9周を回った時点でlucciolaは止まりました。ドライバーから「焦げ臭い」という連絡があり、走行は不可能と判断したためでした。原因は予想が付いていました。
豊田のレギュレーションでは、車体の修理は「自力でピットに戻れない場合はドライバー自ら車載した道具で修理」しなければならなく、それが出来ない場合はリタイヤという厳しいものでした。当然、半田ごてやFETを積んではいないので、ここでリタイヤとなりました。


fig7 fig8 : 回転試験
菅生に引き続き、短期間に新しい部品を製作しなければならない状況に追い込んだことが今回の成績を決めたといっても過言ではありませんでした。大会で勝つこと・表彰台に乗ることを目標に掲げる一方、自作DDMを1年未満で開発・運用することがかなり難しいことは分かっていました。秋田仕様でまともに勝負をすればこのDDMで勝負するよりも成績が良くなることはわかっていましたが、今回はある意味挑戦的にDDM開発を強行しました。これはMeisterのChallenge & Creationにも通じるものだと信じています。成績が望めないと分かっていながらにしてDDM製作を強行し豊田大会に臨むということは、別の見方からすれば「どこまでやることが出来るかという自分との勝負」でした。結果はとても「勝利した」と言えるようなものではありませんが、参加賞をもらえるくらいにはがんばったのではないかと思っています。
DDMの製作が遅れたとはいえ、大会前日に機械部品が完成するというのは論外でした。これはひとえに計画性の無さが引き起こしたミスでした。しかし、振り返ってみると、前期にDDMを完成させることもやはり不可能でした。これはDDMの機械部品の各工程における所要時間が長すぎるために、授業期間中の工場作業ではとても終わるものではないためです。そうなると春休みを利用して完成させることが無難なのですが、なにぶん人手不足でそれも不可能でした。結局、2004年度にそこまでやるということ自体に無理があったということになりますが、出来ないからやらないということはせず、やりたいからやるという信念のもとに何とか形にすることが出来ました。
DDMは、せっかく製作しましたが残る大会で使用することは今のところ予定されていません。このDDMは、来年以降後輩たちの勉強材料になるように、性能評価と調整をすることが大切と考えます。また、どれだけ丁寧にそれを出来るかが今年のDDM製作の課題です。
これまで参戦してきた3大会はいずれも時間不足のための調整不足によって成績は常に半分以下というものでした。しかし、ようやく全ての部品が完成したので、残る2大会においては残りの一ヶ月をかけて準備をすることが出来ます。これからの大会こそ、来年以降へ引き継ぐことの出来る余裕のあるレースが出来るように準備したいと思っています。