- Home
- гғ¬гғқгғјгғҲ
- гӮЁгӮігғҺж—ҘиЁҳ
- гӮўгғјгӮ«гӮӨгғ–
- 2012年12月

2012年12月гҒ®иЁҳдәӢгҒ§гҒҷгҖӮ
жӣёгҒ„гҒҹдәә: spe | 12/12/09 01:40



гӮігғЎгғігғҲгӮ’жӣёгҒҸ
жӣёгҒ„гҒҹдәә: I.F. | 12/12/07 08:22
гҒҜгҒҳгӮҒгҒҫгҒ—гҒҰгҖҒеӨ§еӨүд»ҠжӣҙгҒ§гҒҷгҒҢе…Ҳж—ҘзҸҫеҪ№гӮ’еј•йҖҖгҒ—гҒҹ2012е№ҙеәҰгӮЁгғ¬гӮӯзҸӯдё»д»»гғ‘гғҜгғјзі»жӢ…еҪ“гҖҒ3е№ҙгҒ®I.F.гҒ§гҒҷгҖӮ
еј•йҖҖгҒ—гҒҰгҒӢгӮүеҲқгӮҒгҒҰжҙ»еӢ•е ұе‘ҠгӮ’гҒҷгӮӢгҒ“гҒЁгҒ«гҒӘгҒЈгҒҰгҒ—гҒҫгҒ„гҖҒз”ігҒ—иЁігҒӮгӮҠгҒҫгҒӣгӮ“гҖӮгҒ„гӮҚгҒ„гӮҚгҒЁдҪҷиЈ•гҒҢгҒӘгҒҸгҖҒе ұе‘ҠгҒҜжҖ гҒЈгҒҰгҒ„гҒҫгҒ—гҒҹгҒҢгҖҒгҒҚгҒЎгӮ“гҒЁжҙ»еӢ•гҒҜгҒ—гҒҰгҒҫгҒ„гӮҠгҒҫгҒ—гҒҹгҖӮй•·гҒҸгҒӘгӮҠгҒҫгҒҷгҒҢгҖҒгҒ“гҒ“гҒ§дёҖж°—гҒ«е ұе‘ҠгӮ’гҒ•гҒӣгҒҰгҒ„гҒҹгҒ гҒҚгҒҹгҒ„гҒЁжҖқгҒ„гҒҫгҒҷгҖӮ
гҒ“гӮҢгҒҫгҒ§гҒ«з§ҒгҒҜгғӯгӮ¬гғјгҒ®ж–°еӣһи·Ҝ(гғҸгғјгғүгҒ®гҒҝ)гҒӘгҒ©гӮ’дҪңгҒЈгҒҹгӮҠгҒ—гҒҰгҒ„гҒҫгҒҷгҒҢгҖҒгҒ“гҒ“гҒ§гҒҜ7жңҲй ғгҒ«еҺҹеһӢгҒҢе®ҢжҲҗгҖҒгҒқгҒ®еҫҢж”№иүҜгҒ—гҖҒ9жңҲ30ж—ҘгҒ®иў–гғ¶жөҰеӨ§дјҡгҒӢгӮүдҪҝз”ЁгҒ—гҒҰгҒ„гӮӢиҮӘдҪңгҒ®еҸҢж–№еҗ‘DC-DCгӮігғігғҗгғјгӮҝгғјгӮ’зҙ№д»ӢгҒ—гҒҫгҒҷгҖӮ
д»ҘдёӢгҒ«зӨәгҒҷгҒ®гҒҢгҒқгҒ®дё»еӣһи·ҜйғЁеҲҶгҒ§гҒҷгҖӮ
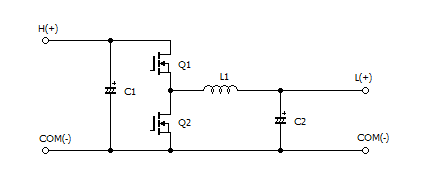
Q1,Q2гӮ’зӣёиЈңPWM(Q1гҒҢгӮӘгғігҒ®гҒЁгҒҚQ2гҒҜгӮӘгғ•гҖҒQ2гҒҢгӮӘгғігҒ®гҒЁгҒҚQ1гҒҜгӮӘгғ•)гҒ§гӮ№гӮӨгғғгғҒгғігӮ°гҒ—гҒҫгҒҷгҖӮQ1гҒ®DutyжҜ”гӮ’ОұгҒЁгҒҷгӮӢгҒЁгҖҒH(+)гҒ®йӣ»ең§VHгҖҒL(+)гҒ®йӣ»ең§VLгҒ®й–“гҒ«гҒҜеӨ§дҪ“VL=ОұVLгҒ®й–ўдҝӮгҒҢжҲҗгӮҠз«ӢгҒЎгҒҫгҒҷгҖӮH(+)еҒҙгҒЁL(+)еҒҙгҒ®гҒ©гҒЎгӮүгҒӢгӮүгҒ©гҒЎгӮүгҒёйӣ»жөҒгҒҢжөҒгӮҢгӮӢгҒӢгҒҜжҺҘз¶ҡгҒҷгӮӢиІ иҚ·гғ»йӣ»жәҗгҒ®йӣ»ең§гҒ§жұәгҒҫгӮҠгҖҒгҒ©гҒЎгӮүеҗ‘гҒҚгҒ«гӮӮиҮӘз”ұгҒ«йӣ»жөҒгҒҢжөҒгӮҢгҒҫгҒҷгҖӮйҖҡеёёгҒ®еҗҢжңҹж•ҙжөҒж–№ејҸDC-DCгӮігғігғҗгғјгӮҝгғјгҒ§гҒҜгҖҒгӮӨгғігғҖгӮҜгӮҝгҒ®йӣ»жөҒгҒҢйҖҶжөҒгҒ—гҒӘгҒ„гӮҲгҒҶгҒ«еҲ¶еҫЎгӮ’иЎҢгҒҶгҒ“гҒЁгҒҢеӨҡгҒ„гӮҲгҒҶгҒ§гҒҷгҒҢгҖҒгҒӮгҒҲгҒҰгҒқгҒҶгҒ„гҒҶгҒ“гҒЁгҒҜгҒ—гҒҰгҒ„гҒҫгҒӣгӮ“гҖӮгҒқгҒ®гҒҹгӮҒи»ҪиІ иҚ·гҒ§гҒҜзӣ®зҡ„гҒ®ж–№еҗ‘гҒЁйҖҶз¬ҰеҸ·гҒ®йӣ»жөҒгҒҢгӮӨгғігғҖгӮҜгӮҝгҒ«жөҒгӮҢгӮӢжңҹй–“гҒҢеӯҳеңЁгҒ—гҖҒз„ЎиІ иҚ·гҒ§гӮӮгӮӨгғігғҖгӮҜгӮҝгҒ«дәӨжөҒйӣ»жөҒгҒҢжөҒгӮҢгҒҫгҒҷгҖӮ
H(+)гҒЁL(+)гҒ®йӣ»ең§гҒ®гғ•гӮЈгғјгғүгғҗгғғгӮҜеҲ¶еҫЎгӮ’иЎҢгҒ„гҒҫгҒҷгҒҢгҖҒH(+)гҒЁL(+)гҒ®гҒ©гҒЎгӮүгӮ’еҲ¶еҫЎгҒҷгӮӢгҒӢгҒҜDIPгӮ№гӮӨгғғгғҒгҒ§йҒёжҠһгҒ§гҒҚгҒҫгҒҷгҖӮйӣ»жөҒгҒҜеҲ¶еҫЎгҒ—гҒҫгҒӣгӮ“гҖӮ
MOSFETгҒҜFairchildиЈҪгҒ®FDP036N10AгӮ’дҪҝз”ЁгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮиҖҗең§гҒҜ100VгҒЁй«ҳиҖҗең§гҒ®гӮҸгӮҠгҒ«гӮӘгғіжҠөжҠ—гҒҜе°ҸгҒ•гҒҸгҖҒ3.2mО©гҒ гҒқгҒҶгҒ§гҒҷгҖӮгӮІгғјгғҲе®№йҮҸгҒҜе°ҸгҒ•гҒҸгҖҒйҖҹеәҰгӮӮй«ҳйҖҹгҒ§гҖҒгҒӘгҒӢгҒӘгҒӢиүҜгҒ„еҘҙгҒ§гҒҷгҖӮ
гӮӨгғігғҖгӮҜгӮҝгҒҜгғһгӮӨгӮ№гӮҝгғјеҖүеә«гҒ«дҪ•е№ҙгӮӮеүҚгҒӢгӮүгҒӮгӮӢгҖҒгӮўгғўгғ«гғ•гӮЎгӮ№гӮ«гғғгғҲгӮігӮўгҒ®100ОјH, е·»з·ҡжҠөжҠ—7.6mО©дҪҚгҒ®гӮӮгҒ®гӮ’дҪҝгҒЈгҒҰгҒ„гҒҫгҒҷгҖӮ
еҲ¶еҫЎеӣһи·ҜгҒ®йӣ»жәҗгҒ«гҒҜй«ҳиҖҗең§гҒЁгҒҷгӮӢгҒҹгӮҒиҮӘдҪңгҒ®гғӘгғӢгӮўгғ¬гӮ®гғҘгғ¬гғјгӮҝгӮ’дҪҝз”ЁгҒ—гҒҰгҒҠгӮҠгҖҒеҲ¶еҫЎеӣһи·Ҝе…ЁдҪ“гҒ®ж¶ҲиІ»йӣ»жөҒгҒҜжңҖеӨ§гҒ§20mAдҪҚгҒ§гҒҷгҖӮ
йҖҡеёёгҒ®йҷҚең§гғҒгғ§гғғгғ‘гғ»жҳҮең§гғҒгғ§гғғгғ‘гҒ§гҒҜгғ•гғӘгғјгғӣгӮӨгғјгғ«гҒӮгӮӢгҒ„гҒҜгғ–гғӯгғғгӮӯгғігӮ°гғҖгӮӨгӮӘгғјгғүгҒ§ж•ҙжөҒгӮ’гҒҷгӮӢгҒ®гҒ§гғҖгӮӨгӮӘгғјгғүгҒ®йӣ»ең§йҷҚдёӢгҒ«гӮҲгӮӢжҗҚеӨұгҒҢгҒқгӮҢгҒӘгӮҠгҒ«гҒӮгӮҠгҒҫгҒҷгҖӮгҒЁгҒ“гӮҚгҒҢгҒ“гҒ®DC-DCгӮігғігғҗгғјгӮҝгғјгҒ®гӮҲгҒҶгҒӘеҸҢж–№еҗ‘гғҒгғ§гғғгғ‘гҒ§гҒҜгҖҒгғҮгғғгғүгӮҝгӮӨгғ гӮ’йҷӨгҒ„гҒҰQ1гҒЁQ2гҒ®гҒ„гҒҡгӮҢгҒӢгҒ«гҒҜеҝ…гҒҡгӮІгғјгғҲгҒ«йӣ»ең§гӮ’еҠ гҒҲгҒҰгӮӘгғігҒ«гҒҷгӮӢгҒ®гҒ§гҖҒMOSFETгҒ§гҒ®йӣ»ең§йҷҚдёӢгҒҜгҒ»гҒјгӮӘгғіжҠөжҠ—гҒ«гӮҲгӮӢгӮӮгҒ®гҒ®гҒҝгҒ§гҒҷгҖӮгҒқгҒ®гҒҹгӮҒгҒ«дҪҝгҒ„ж–№гҒ«гӮҲгҒЈгҒҰгҒҜеӨ§еӨүй«ҳеҠ№зҺҮгҒ§гҖҒдҫӢгҒҲгҒ°VL=20[V], VH=40[V]гҒ§H(+)еҒҙгҒё10AеҮәеҠӣгҒ—гҒҰгҒ„гӮӢгҒЁгҒҚзҙ„97%(еҲ¶еҫЎеӣһи·ҜгҒ®йӣ»еҠӣж¶ҲиІ»гҒҜиЁҲз®—гҒ«еҗ«гӮҒгҒӘгҒ„)гҒЁгҒ„гҒҶжё¬е®ҡзөҗжһңгҒҢеҮәгҒҫгҒ—гҒҹгҖӮдёҖж–№гҖҒVL=5[V], VH=10[V]гҒ§H(+)еҒҙгҒё8AеҮәеҠӣгҒ®жҷӮгҒ«гҒҜ90%гҒЁйӣ»ең§жҜ”гҒҢеҗҢгҒҳгҒ§гӮӮеҠ№зҺҮгҒҜгҒ гҒ„гҒ¶йҒ•гҒҶгӮҲгҒҶгҒ§гҒҷгҖӮйӣ»ең§йҷҚдёӢгҒ®еҪұйҹҝгҒҢзӣёеҜҫзҡ„гҒ«еӨ§гҒҚгҒҸгҒӘгӮӢгҒӢгӮүгҒ§гҒ—гӮҮгҒҶгҒӢгҖӮ
гҒ“гҒ®DC-DCгӮігғігғҗгғјгӮҝгғјгҒҜдёҠиҝ°гҒ—гҒҹгӮҲгҒҶгҒ«йҖҶжөҒйҳІжӯўгӮ’гҒ—гҒӘгҒ„гҒ®гҒ§гҖҒз„ЎиІ иҚ·гҒ§еӢ•дҪңгҒ•гҒӣгӮӢгҒЁеҲ¶еҫЎеӣһи·ҜгҒ®ж¶ҲиІ»йӣ»жөҒгҒЁгҒҜеҲҘгҒ«H(+)еҒҙгҒ§гҒҜйҖҡеёёж•°еҚҒmAгҖҒжңҖжӮӘ100mAзЁӢеәҰйӣ»жөҒгӮ’ж¶ҲиІ»гҒҷгӮӢгҒЁгҒ„гҒҶж¬ зӮ№гҒҢгҒӮгӮҠгҒҫгҒҷгҖӮ
гҒ“гҒ®DC-DCгӮігғігғҗгғјгӮҝгғјгӮ’第2еӣһиў–гғ¶жөҰеӨ§дјҡгҖҒиҲһжҙІеӨ§дјҡгҒ§гҒҜж¬ЎгҒ®гӮҲгҒҶгҒ«дҪҝгҒ„гҒҫгҒ—гҒҹгҖӮ
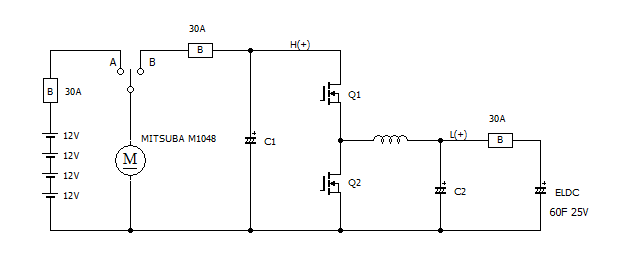
еӣһз”ҹз”ЁгҒ«600F2.5VгҒ®йӣ»ж°—дәҢйҮҚеұӨгӮӯгғЈгғ‘гӮ·гӮҝгӮ’10зӣҙгҒ«гҒ—гҒҹгӮӮгҒ®гӮ’дҪҝгҒ„гҒҫгҒ—гҒҹгҖӮгӮӯгғЈгғ‘гӮ·гӮҝгҒ®йӣ»ең§VLгӮ’еҸҢж–№еҗ‘DC-DCгӮігғігғҗгғјгӮҝгғјгҒ§VHгҒ«жҳҮең§гҒ—гҒҰгӮ„гӮӢгҒЁгҖҒгғўгғјгӮҝгғјеҒҙгҒӢгӮүиҰӢгӮӢгҒЁйӣ»ең§VHгҖҒе®№йҮҸVL/VHеҖҚгҒ®гӮӯгғЈгғ‘гӮ·гӮҝгҒ«иҰӢгҒҲгҒҫгҒҷгҖӮгҒӨгҒҫгӮҠгҖҒVHгӮ’гғңгғӘгғҘгғјгғ гҒ§иӘҝж•ҙгҒ§гҒҚгӮӢгӮҲгҒҶгҒ«гҒҷгӮӢгҒЁгҖҒеҸҜеӨүйӣ»ең§гғ»е®№йҮҸгӮӯгғЈгғ‘гӮ·гӮҝгҒ®гӮҲгҒҶгҒ«жҢҜиҲһгӮҸгҒӣгӮӢгҒ“гҒЁгҒҢеҮәжқҘгӮӢгӮҸгҒ‘гҒ§гҒҷгҖӮVHгҒҢгғўгғјгӮҝгғјиө·йӣ»еҠӣгӮҲгӮҠй«ҳгҒ‘гӮҢгҒ°гӮӯгғЈгғ‘гӮ·гӮҝгҒӢгӮүгғўгғјгӮҝгғјгҒёгҖҒVHгҒҢгғўгғјгӮҝгғјиө·йӣ»еҠӣгӮҲгӮҠдҪҺгҒ‘гӮҢгҒ°гғўгғјгӮҝгғјгҒӢгӮүгӮӯгғЈгғ‘гӮ·гӮҝгҒёйӣ»еҠӣгҒҢеӢқжүӢгҒ«жөҒгӮҢгҒҰгҒ„гҒҸгҒ®гҒ§гҖҒеҠӣиЎҢгғ»еӣһз”ҹгӮ’гӮ·гғјгғ гғ¬гӮ№гҒ«иЎҢгҒҶгҒ“гҒЁгҒҢеҮәжқҘгҒҫгҒҷгҖӮ
е…Ҳж—ҘгҒ®NATSеӨ§дјҡгҒ§гҒҜгҖҒд»ҘдёӢгҒ®гӮҲгҒҶгҒӘеӣһи·Ҝж§ӢжҲҗгҒЁгҒ—гҒҫгҒ—гҒҹгҖӮ
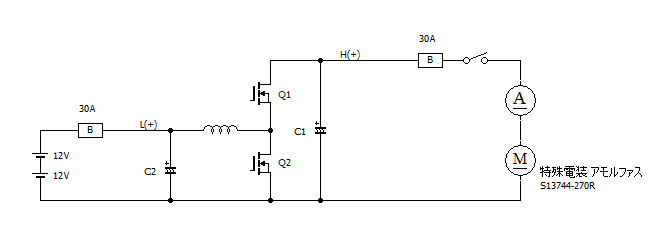
S13744-270RгҒҜгғ•гғ«гғңгғӘгғҘгғјгғ гҒ§е…ҘеҠӣйӣ»жөҒгҒҢ1.5пҪһ6AгҒ®гҒЁгҒҚеҠ№зҺҮ90%д»ҘдёҠгҒӘгҒ®гҒ§гҖҒйҖҡйӣ»жҷӮгҒҜеёёгҒ«гҖҒзү№гҒ«йӣ»еҠӣж¶ҲиІ»гҒ®еӨ§гҒҚгҒ„зҷ»еқӮжҷӮгҒ«гҒҜгҒ“гҒ®й ҳеҹҹгҒ§дҪҝгҒҲгӮӢгӮҲгҒҶгҒ«гҒҷгӮҢгҒ°гғўгғјгӮҝгғјзҡ„гҒ«гҒҜзҗҶжғізҡ„гҒ§гҒӮгӮӢиҖғгҒҲгӮүгӮҢгҒҫгҒҷгҖӮгҒЁгӮҠгҒӮгҒҲгҒҡгҖҒNATSгҒ®еӢҫй…Қ4%гҒ®зҷ»гӮҠеқӮгҒ§з©әж°—жҠөжҠ—гҒӘгҒ©гӮ’з„ЎиҰ–гҒ—гҒҰгғ•гғ«гғңгғӘгғҘгғјгғ 6AжҷӮгҒ®гғҲгғ«гӮҜгҒ§еҠӣгҒ®йҮЈгӮҠеҗҲгҒ„гҒҢгҒЁгӮҢгӮӢгӮҲгҒҶгҒӘгӮ®гӮўгҒ®жёӣйҖҹжҜ”гӮ’иЁҲз®—гҒ—гҒҰгҒҝгӮӢгҒЁ11гҒҸгӮүгҒ„гҒ«гҒӘгӮҠгҒҫгҒҷгҒҢгҖҒеҸ–гӮҠд»ҳгҒ‘гӮүгӮҢгӮӢгӮ®гӮўгҒ®зө„гҒҝеҗҲгӮҸгҒӣгҒ§жёӣйҖҹжҜ”гҒҢжңҖеӨ§гҒЁгҒӘгӮӢгҒ®гҒҜ120:20=6:1гҒ®6гҒӘгҒ®гҒ§гҖҒгҒЁгӮҠгҒӮгҒҲгҒҡгҒ“гҒ®зө„гҒҝеҗҲгӮҸгҒӣгҒЁгҒ—гҒҫгҒҷгҖӮгҒЁгҒ“гӮҚгҒҢжёӣйҖҹжҜ”6гҒ гҒЁйӣ»жәҗ24VгҒ®гҒЁгҒҚгҖҒз„ЎиІ иҚ·еӣһи»ўж•°жҷӮгҒ®йҖҹеәҰгҒҢ31km/hгҒ«гҒӘгӮҠгҒҫгҒҷгҖӮз§ҒгҒҹгҒЎгҒ®гӮҲгҒҶгҒӘж§ӢжҲҗгҒ§гҒҜNATSгҒ§гҒҜдёҠгӮҠеқӮгҒ®е№іеқҰгҒӘгӮ№гғҲгғ¬гғјгғҲгҒ§еҚҒеҲҶгҒ«йҖҹеәҰгӮ’дёҠгҒ’гҒҰгҖҒгҒқгҒ®еӢўгҒ„гҒ§зҷ»еқӮгҒ—гҒҰгғўгғјгӮҝгғјйӣ»жөҒгҒҢдёҠгҒҢгӮҠйҒҺгҒҺгҒӘгҒ„гӮҲгҒҶгҒ«гҒҷгӮӢж–№жі•гҒҢиүҜгҒ„гҒЁиҖғгҒҲгҒҰгҒ„гӮӢгҒ®гҒ§гҖҒз„ЎиІ иҚ·гҒ§гҒ“гҒ®йҖҹеәҰгҒҜе°‘гҒ—йҒ…гҒ„гҒЁиҖғгҒҲгӮүгӮҢгҒҫгҒҷгҖӮгҒқгҒ“гҒ§дёҠеӣігҒ®гӮҲгҒҶгҒ«DC-DCгӮігғігғҗгғјгӮҝгғјгӮ’дҪҝз”ЁгҒ—гҒҰйӣ»жәҗйӣ»ең§гӮ’еӢ•дҪңдҝқйҡңйӣ»ең§гҒ®жңҖеӨ§гҒ®30V(зө¶еҜҫжңҖеӨ§е®ҡж јгҒҜ40Vпјҹ)гҒҫгҒ§жҳҮең§гҒ§гҒҚгӮӢгӮҲгҒҶгҒ«гҒҷгӮӢгҒЁгҖҒз„ЎиІ иҚ·жҷӮгҒ®йҖҹеәҰгӮ’39km/hзЁӢеәҰгҒҫгҒ§дёҠгҒ’гӮӢгҒ“гҒЁгҒҢгҒ§гҒҚгҖҒеҚҒеҲҶеҠ йҖҹгҒҷгӮӢгҒ“гҒЁгҒҢеҮәжқҘгӮӢгӮҲгҒҶгҒ«гҒӘгӮҠгҒҫгҒҷгҖӮ
гҒҫгҒҹгҖҒйӣ»жәҗйӣ»ең§гҒҢеӣәе®ҡгҒ®е ҙеҗҲгҖҒгғ•гғ«гғңгғӘгғҘгғјгғ гҒ§гҒҜйӣ»жөҒгҒҜйҖҹеәҰгҒЁйӣ»жәҗйӣ»ең§гҒ«гӮҲгҒЈгҒҰжұәгҒҫгӮӢгҒ®гҒ§гҖҒйӣ»жөҒгӮ’гӮігғігғҲгғӯгғјгғ«гҒҷгӮӢгҒҹгӮҒгҒ«гҒҜгғңгғӘгғҘгғјгғ гӮ’зөһгӮӢгҒ“гҒЁгҒ«гҒӘгӮҠгҒҫгҒҷгҖӮгҒЁгҒ“гӮҚгҒҢгғңгғӘгғҘгғјгғ гӮ’зөһгӮӢгҒЁгғўгғјгӮҝгғјгӮігғігғҲгғӯгғјгғ©гғјгҒ®PWMгҒ«гӮҲгӮҠеҠ№зҺҮгҒҢжӮӘеҢ–гҒ—гҖҒгҒ•гӮүгҒ«йӣ»жөҒиЁҲгҒ«иЎЁзӨәгҒ•гӮҢгӮӢгғўгғјгӮҝгғјгҒ®е…ҘеҠӣйӣ»жөҒгҒЁе·»з·ҡйӣ»жөҒгҒҢеҜҫеҝңгҒ—гҒӘгҒҸгҒӘгӮӢгҒ®гҒ§гҖҒгғүгғ©гӮӨгғҗгғјгҒҢе·»з·ҡйӣ»жөҒгӮ’еҠ№зҺҮгҒҢиүҜгҒ„й ҳеҹҹгҒ«гӮігғігғҲгғӯгғјгғ«гҒҷгӮӢгҒ®гҒҢйӣЈгҒ—гҒҸгҒӘгӮҠгҒҫгҒҷгҖӮгҒқгҒ“гҒ§гӮ®гӮўжҜ”гӮ’еӨ§гҒҚгӮҒгҒ«гҒ—гҒҰDC-DCгӮігғігғҗгғјгӮҝгғјгҒ§жҳҮең§гҒҷгӮӢгӮҲгҒҶгҒ«гҒҷгӮӢгҒЁгҖҒйҖҹеәҰгҒҢдёҠгҒҢгҒЈгҒҰгғўгғјгӮҝгғјгҒ®иө·йӣ»еҠӣгҒҢгҒӮгӮӢзЁӢеәҰгҒҫгҒ§дёҠгҒҢгӮҢгҒ°гғўгғјгӮҝгғјгӮігғігғҲгғӯгғјгғ©гғјгҒҜгғ•гғ«гғңгғӘгғҘгғјгғ гҒ«гҒ—гҒҰгҖҒDC-DCгӮігғігғҗгғјгӮҝгғјгҒ®гғңгғӘгғҘгғјгғ гӮ’гғўгғјгӮҝгғјгҒ®е…ҘеҠӣйӣ»жөҒ(вҲқе·»з·ҡйӣ»жөҒгҒ®е®ҹеҠ№еҖӨ)гӮ’йӣ»жөҒиЁҲгҒ§иҰӢгҒӘгҒҢгӮүж“ҚдҪңгҒҷгӮӢгҒ“гҒЁгҒҢеҮәжқҘгӮӢгӮҲгҒҶгҒ«гҒӘгӮҠгҒҫгҒҷгҖӮ
гҒЎгҒӘгҒҝгҒ«DC-DCгӮігғігғҗгғјгӮҝгғјгҒҜVL=20[V] вҶ’ VH=30[V]зЁӢеәҰгҒ®жҳҮең§гҒ§гҒӮгӮҢгҒ°гҖҒеҠ№зҺҮ98%пҪһ99%зЁӢеәҰгҒ§дҪҝз”ЁгҒ§гҒҚгӮӢгҒЁгҒ„гҒҶжё¬е®ҡзөҗжһңгҒҢеҮәгҒҰгҒ„гӮӢ(жё¬е®ҡиӘӨе·®гҒҢгҒ©гҒ®гҒҸгӮүгҒ„гҒӮгӮӢгҒ®гҒӢгҒҢж°—гҒ«гҒӘгӮҠгҒҫгҒҷгҒҢ...)гҒ®гҒ§гҖҒDC-DCгӮігғігғҗгғјгӮҝгғјгҒ®жҗҚеӨұгҒҜз„ЎиҰ–гҒ—гҒҰиүҜгҒ„гҒЁиҖғгҒҲгҒҫгҒ—гҒҹгҖӮ
гғҗгғғгғҶгғӘгғјгҒ«дёҰеҲ—гҒ«11зӣҙгҒ®гӮӯгғЈгғ‘гӮ·гӮҝгӮ’жҺҘз¶ҡгҒ—гҒҰгғҗгғғгғҶгғӘгғјгҒ®йӣ»жөҒгӮ’гҒӮгӮӢзЁӢеәҰе№іж»‘еҢ–гҒ•гҒӣгӮҲгҒҶгҒӢгҒЁгӮӮиҖғгҒҲгҒҫгҒ—гҒҹгҒҢгҖҒи©ҰгҒ—гҒ«11зӣҙгҒ«гҒ—гҒҰ20VгҒҸгӮүгҒ„гҒҫгҒ§е……йӣ»гҒ—гҒҰгҒҝгҒҹгҒЁгҒ“гӮҚгҖҒзү©гҒ«гӮҲгҒЈгҒҰ1.6VгҒ гҒЈгҒҹгӮҠ2.2VгҒ гҒЈгҒҹгӮҠгҒЁгҖҒгҒӢгҒӘгӮҠгҒ°гӮүгҒӨгҒ„гҒҰ25VгҒҫгҒ§е……йӣ»гҒҷгӮӢгҒЁдёҖйғЁе®ҡж јгӮ’гӮӘгғјгғҗгғјгҒҷгӮӢгҒ®гҒ§жӯўгӮҒгҒҫгҒ—гҒҹгҖӮ
гҒ•гҒҰгҖҒе®ҹйҡӣгҒ«еӨ§дјҡгҒ§дҪҝз”ЁгҒ—гҒҰгҒҝгҒҰгҒ©гҒҶгҒ гҒЈгҒҹгҒӢгҒҢе•ҸйЎҢгҒ§гҒҷгҒҢгҖҒдҫӢгҒЁгҒ—гҒҰNATSгҒ®гғӯгӮ°гғҮгғјгӮҝгҒ®гҒҶгҒЎеҲҶгҒӢгӮҠгӮ„гҒҷгҒ„пј‘е‘ЁеҲҶгӮ’д»ҘдёӢгҒ«зӨәгҒ—гҒҫгҒҷгҖӮ
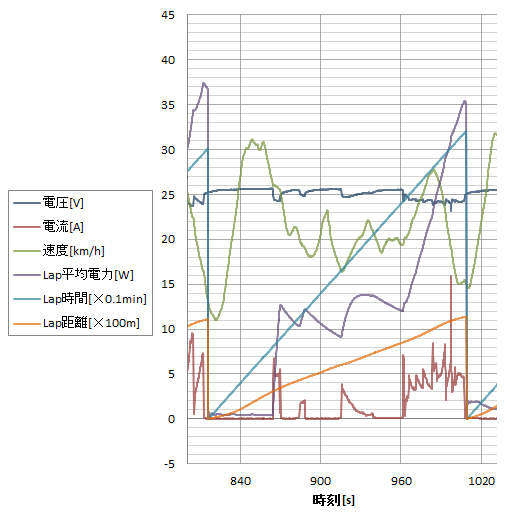
гӮ°гғ©гғ•гҒ®йӣ»жөҒгҒҜгғҗгғғгғҶгғӘгғјйӣ»жөҒгҒ§гҒҷгҖӮдҫҝе®ңдёҠгғ©гғғгғ—иЁҲжё¬гҒҜеқӮгҒ®й ӮдёҠгҒӢгӮүиЎҢгҒЈгҒҰгҒ„гҒҫгҒҷгҖӮжҷӮеҲ»960пҪһ1000[s]гҒ®йӣ»жөҒжіўеҪўгҒӢгӮүгҖҒгғүгғ©гӮӨгғҗгғјгҒҢгғўгғјгӮҝгғјйӣ»жөҒгӮ’дёҖе®ҡгҒ«гҒ—гӮҲгҒҶгҒЁгҒ—гҒҰгҒҸгӮҢгҒҰгҒ„гӮӢгҒ®гҒҢеҲҶгҒӢгӮҠгҒҫгҒҷгҖӮгӮ„гҒҜгӮҠеҲ»гҖ…гҒЁеӨүеҢ–гҒ—гӮҲгҒҶгҒҷгӮӢйӣ»жөҒеҖӨгӮ’гғ¬гғјгӮ№дёӯгҒ«йӣ»жөҒиЁҲгӮ’иҰӢгҒӘгҒҢгӮүдёҖе®ҡгҒ«дҝқгҒӨгӮҲгҒҶгҒ«ж“ҚдҪңгҒҷгӮӢгҒ®гҒҜе°‘гҒ—йӣЈгҒ—гҒ„гӮҲгҒҶгҒ§гҖҒжіўеҪўгҒҢгӮ®гӮ¶гӮ®гӮ¶гҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ(гҒқгӮҢгҒ§гӮӮгҒ“гҒ®гғ©гғғгғ—гҒ®жіўеҪўгҒҜгҒӢгҒӘгӮҠгҒҚгӮҢгҒ„гҒӘж–№гҒ§гҒҷгҖӮ)
DC-DCгӮігғігғҗгғјгӮҝгғјгҒҜйӣ»жөҒжё¬е®ҡж©ҹиғҪгӮ’гҒӨгҒ‘гҖҒCVгғ»CCеҲ¶еҫЎгҒҷгӮӢгҒ®гҒҢзҗҶжғізҡ„гҒӘгӮҲгҒҶгҒ§гҒҷгҖӮ
е®ҹгҒҜгғӯгӮ¬гғјгҒҜгғҮгғјгӮҝиЁҳйҢІгҒ®гғҲгғ©гғ–гғ«гҒҢгҒҡгҒЈгҒЁд»ҘеүҚгӮҲгӮҠи§Јж¶ҲгҒ§гҒҚгҒҰгҒҠгӮүгҒҡгҖҒгғҮгғјгӮҝгҒҜгҒҜгҒҳгӮҒгҒ®30еҲҶдҪҚгҒ—гҒӢеҸ–гӮҢгҒҰгҒ„гҒҫгҒӣгӮ“гҒ§гҒ—гҒҹгҒҢгҖҒе№іеқҮгҒҷгӮӢгҒЁеӨ§дҪ“1гғ©гғғгғ—гҒ§е№іеқҮйӣ»еҠӣ37WгҖҒгғ©гғғгғ—гӮҝгӮӨгғ 3:00зЁӢеәҰгҒ§гҖҒйӣ»еҠӣгӮ’дҪҝгҒ„йҒҺгҒҺгҒӘж°—гҒҜгҒ—гҒҫгҒҷгҒҢйӣЁеӨ©гҒ«гҒ—гҒҰгҒҜжӮӘгҒҸгҒӘгҒӢгҒЈгҒҹгҒ®гҒ§гҒҜгҒӘгҒ„гҒӢгҒЁжҖқгҒ„гҒҫгҒҷгҖӮ
гҒЁгҒ“гӮҚгҒҢе…Ҳж—ҘгҒ®гӮЁгӮігғҺж—ҘиЁҳгҒ§жқ‘дёҠеҗӣгҒҢе ұе‘ҠгҒ—гҒҰгҒ„гӮӢгӮҲгҒҶгҒ«гҖҒй–Ӣе§ӢгҒӢгӮү25еҲҶзЁӢеәҰгҒ§и»ҠдҪ“гғҲгғ©гғ–гғ«гҒҢзҷәз”ҹгҒ—гҖҒгғ”гғғгғҲгӮӨгғігӮ’з№°гӮҠиҝ”гҒҷгҒ“гҒЁгҒ«гҒӘгҒЈгҒҰгҒ—гҒҫгҒ„гҖҒгҒӮгҒҫгӮҠиүҜгҒ„зөҗжһңгҒ«гҒҜгҒӘгӮҠгҒҫгҒӣгӮ“гҒ§гҒ—гҒҹгҖӮ
зөҗеұҖгҖҒ1е№ҙйҖҡгҒ—гҒҰз§ҒгҒҹгҒЎгҒ®д»ЈгҒ§гҒҜгҒ©гҒ®гғ¬гғјгӮ№гҒ§гӮӮгҒҫгҒЁгӮӮгҒ«иө°гӮҢгҒҡгҒ«еј•йҖҖгӮ’иҝҺгҒҲгӮӢгҒ“гҒЁгҒЁгҒӘгҒЈгҒҰгҒ—гҒҫгҒ„гҒҫгҒ—гҒҹгҖӮ
жҖқгҒ„иҝ”гҒҷгҒЁгҖҒз§ҒгҒҹгҒЎгҒ®д»ЈгҒ§гҒҜж§ҳгҖ…гҒӘеӨұж•—гӮ’гҒ—гҒҫгҒ—гҒҹгҖӮгӮЁгғ¬гӮӯзҸӯгҒЁгҒ—гҒҰгҒҜгғўгғјгӮҝгғјгӮ’2еӣһз ҙеЈҠгҒ•гҒӣгҒҰгҒ„гҒҫгҒҷгҖӮ
1еӣһзӣ®гҒҜзү№йӣ»гӮўгғўгғ«гғ•гӮЎгӮ№гғўгғјгӮҝгғјS13744-270RгҒ§гҒҷгҖӮ
з°ЎеҚҳгҒ«иӘ¬жҳҺгҒҷгӮӢгҒ®гҒҜйӣЈгҒ—гҒ„гҒ®гҒ§гҒҷгҒҢгҖҒиЁігҒӮгҒЈгҒҰгғўгғјгӮҝгғјгҒӢгӮүи»ёгӮ’еј•гҒҚжҠңгҒ“гҒҶгҒЁгҒ—гҒҫгҒ—гҒҹгҒҢгҖҒи»ёгҒЁгғҷгӮўгғӘгғігӮ°гҒ®гҒҜгӮҒгҒӮгҒ„гҒҢдәҲжғід»ҘдёҠгҒ«гҒҚгҒӨгҒҸгҒҰдёӯйҖ”еҚҠз«ҜгҒ«гҒ—гҒӢжҠңгҒ‘гҒҡгҖҒд»•ж–№гҒӘгҒҸжҲ»гҒқгҒҶгҒЁгҒ—гҒҰгӮӮз°ЎеҚҳгҒ«гҒҜжҲ»гӮүгҒҡгҖҒдҪ•гҒЁгҒӢгҒ—гҒӘгҒ‘гӮҢгҒ°гҒӘгӮүгҒӘгҒ„гҒЁз„ҰгҒЈгҒҰз„ЎзҗҶгӮ„гӮҠжҠјгҒ—иҫјгӮ“гҒ§гӮӮгҒЁгҒ®дҪҚзҪ®гҒ«жҲ»гҒ—гҒҫгҒ—гҒҹгҖӮдҪҚзҪ®гҒҜе…ғгҒ«жҲ»гӮҠгҒҫгҒ—гҒҹгҒҢеӣһи»ўгҒ•гҒӣгӮӢгҒЁз•°еёёгҒӘжҠөжҠ—гӮ’ж„ҹгҒҳгҒҹгҒ®гҒ§гҖҒеҫҢж—Ҙеј•гҒҚжҠңгҒҚе·Ҙе…·гӮ’дҪңгҒЈгҒҰи»ёгӮ’е®Ңе…ЁгҒ«еј•гҒҚжҠңгҒ„гҒҹгҒЁгҒ“гӮҚгҖҒгғҷгӮўгғӘгғігӮ°гҒЁгғҸгӮҰгӮёгғігӮ°гҒ®й–“(еҒҙйқў)гҒ«жіўгғҜгғғгӮ·гғЈгғјгҒҢжҢҹгҒҫгӮҠгғҸгӮҰгӮёгғігӮ°гҒ«дәҖиЈӮгҒҢе…ҘгҒЈгҒҰгҒ—гҒҫгҒЈгҒҰгҒ„гҒҫгҒ—гҒҹгҖӮ

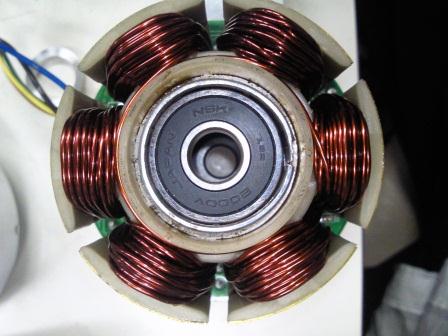
жіўгғҜгғғгӮ·гғЈгғјгҒҜеҶҷзңҹгҒ®гғҷгӮўгғӘгғігӮ°гҒ®еҗ‘гҒ“гҒҶгҒ«гҒӮгҒЈгҒҹгӮӮгҒ®гҒ§гҒҷгҖӮи»ёгӮ’е°‘гҒ—еј•гҒҚжҠңгҒ„гҒҰгғҷгӮўгғӘгғігӮ°гҒҢгғҸгӮҰгӮёгғігӮ°гҒӢгӮүеӨ–гӮҢгҒҹйҡӣгҒ«гҖҒжіўгғҜгғғгӮ·гғЈгғјгҒҢгҒҡгӮҢгҒҰгғҷгӮўгғӘгғігӮ°гҒЁгғҸгӮҰгӮёгғігӮ°гҒ®й–“гҒ«е…ҘгӮҠиҫјгӮ“гҒ гӮҲгҒҶгҒ§гҒҷгҖӮзөҗеұҖгҒ“гҒ®гғҸгӮҰгӮёгғігӮ°гҒҜдәӨжҸӣгҒҷгӮӢгҒ“гҒЁгҒ«гҒӘгӮҠгҒҫгҒ—гҒҹгҖӮгҒ“гҒ®д»¶гҒ«й–ўгҒ—гҒҰгҖҒZDPгҒ•гӮ“гҒ«гҒҜгҒҠдё–и©ұгҒ«гҒӘгӮҠгҒҫгҒ—гҒҹгҖӮ
2еӣһзӣ®гҒҜMITSUBA M1048гҒ®гғўгғјгӮҝгғјгӮігғігғҲгғӯгғјгғ©гғјгҒ§гҒҷгҖӮ
иҸ…з”ҹеӨ§дјҡзӣҙеүҚгҒ®гғҶгӮ№гғҲгғ©гғіеүҚгҖҒи»ҠдҪ“гҒ®гӮ»гғғгғҲгӮўгғғгғ—гҒҢгҒҷгҒ№гҒҰзөӮгӮҸгҒЈгҒҹеҫҢгҖҒзўәиӘҚгҒ®гҒҹгӮҒгҒ«гғўгғјгӮҝгғјгҒ«йҖҡйӣ»гҒ—гҒҰз©әи»ўгҒ•гҒӣгҒҫгҒ—гҒҹгҖӮеӢўгҒ„иүҜгҒҸеӣһгӮӢгғўгғјгӮҝгғјгҖҒгҒ—гҒӢгҒ—гҒҫгӮӮгҒӘгҒҸгҖҢгғҗгғҒгғғгҖҚгҒЁйҹігҒҢгҒ—гҒҰеӣһи»ўгҒҢжӯўгҒҫгӮҠгҖҒгҒқгҒ®еҫҢгҒҜгҒҶгӮ“гҒЁгӮӮгҒҷгӮ“гҒЁгӮӮиЁҖгӮҸгҒӘгҒҸгҒӘгӮҠгҒҫгҒ—гҒҹгҖӮгӮӮгҒ—гӮ„гҒЁжҖқгҒЈгҒҰгғўгғјгӮҝгғјжң¬дҪ“гҒӢгӮүеҮәгҒҰгҒ„гӮӢйӣ»з·ҡгӮ’иҰӢгӮӢгҒЁгҖҒгғӯгғјгӮҝгғјгҒЁйӣ»з·ҡгҒҢгҒ“гҒҷгӮҢгҒҰиў«иҰҶгҒҢеҲҮгӮҢгҒҰе°ҺдҪ“гҒҢиҰӢгҒҲгҒҰгҒ„гҒҫгҒ—гҒҹгҖӮйҮ‘еұһиЈҪгҒ®гғӯгғјгӮҝгғјгӮ’йҖҡгҒ—гҒҰеӢ•еҠӣз·ҡгҒЁи§’еәҰгӮ»гғігӮөгҒ®гӮ°гғ©гӮҰгғігғүз·ҡгҒҢгӮ·гғ§гғјгғҲгҒ—гҖҒгғўгғјгӮҝгғјгӮігғігғҲгғӯгғјгғ©гғјгҒ®еҲ¶еҫЎеӣһи·ҜеҶ…гҒ«еӨ§йӣ»жөҒгҒҢдҫөе…ҘгҖҒеҹәжқҝгҒ®гӮ°гғ©гӮҰгғігғүгғ‘гӮҝгғјгғігӮ’еҗ№гҒҚйЈӣгҒ°гҒ—гҒҰиҮҙе‘Ҫзҡ„гҒӘгғҖгғЎгғјгӮёгӮ’дёҺгҒҲгҒҰгҒ—гҒҫгҒЈгҒҹгӮҲгҒҶгҒ§гҒҷгҖӮ
гҒ“гҒ®дәӢж•…гҒҜиҸ…з”ҹеӨ§дјҡгҒ®ж•°ж—ҘеүҚгҒ гҒЈгҒҹгҒ®гҒ§гҖҒеӨ§дјҡгҒҜжЈ„жЁ©гҒҷгӮӢгҒ“гҒЁгҒ«гҒӘгҒЈгҒҰгҒ—гҒҫгҒ„гҒҫгҒ—гҒҹгҖӮгғҒгғјгғ гҒ®гғЎгғігғҗгғјгҒҠгӮҲгҒіеҝңжҸҙгҒ—гҒҰгҒҸгҒ гҒ•гҒЈгҒҹж–№гҖ…гҒ«гҒҜз”ігҒ—иЁігҒӘгҒ„гҒ“гҒЁгӮ’гҒ—гҒҹгҒЁжҖқгҒ„гҒҫгҒҷгҖӮ
гҒқгҒ®еҫҢMITSUBAгҒ•гӮ“гҒ«иӘҝжҹ»гӮ’гҒ—гҒҰгҒ„гҒҹгҒ гҒҚгҒҫгҒ—гҒҹгҒҢгҖҒдҝ®зҗҶдёҚеҸҜгҒЁгҒ„гҒҶгҒ“гҒЁгҒ§гӮігғігғҲгғӯгғјгғ©гҒҜеҶҚиіје…ҘгҒҷгӮӢгҒ“гҒЁгҒ«гҒӘгӮҠгҒҫгҒ—гҒҹгҖӮ
и»ҠдҪ“гҒ®ж§ӢйҖ дёҠгҖҒгғӯгғјгӮҝгғјгҒЁйӣ»з·ҡгҒҜжҺҘи§ҰгҒ—гӮ„гҒҷгҒ„дҪҚзҪ®гҒ«жқҘгӮӢгҒ“гҒЁгҒҢгҒӮгӮҠгҒҫгҒҷгҒҢгҖҒйӣ»з·ҡгҒҜзўәе®ҹгҒӘж–№жі•гҒ§еӣәе®ҡгҒ—гҒҰгҒҠгӮүгҒҡгҖҒгҒ•гӮүгҒ«еӣһи»ўеүҚгҒ«еҚұйҷәгҒҢгҒӘгҒ„гҒӢгғўгғјгӮҝгғје‘ЁиҫәгӮ’гҒҚгҒЎгӮ“гҒЁзўәиӘҚгӮ’гҒ—гҒӘгҒӢгҒЈгҒҹгҒ®гҒҢгҒ„гҒ‘гҒӘгҒӢгҒЈгҒҹгҒ®гҒ гҒЁжҖқгҒ„гҒҫгҒҷгҖӮ
д»ҘеҫҢгҖҒйӣ»з·ҡгҒҜзөҗжқҹгғҗгғігғүгҒ§еӣәе®ҡгҒ—гҖҒеӣһи»ўеүҚгҒ®зўәиӘҚгӮ’еҫ№еә•гҒҷгӮӢгӮҲгҒҶгҒ«гҒ—гҒҫгҒ—гҒҹгҖӮ
е°‘гҖ…гҒ®гҒҡгҒ•гӮ“гҒ•гҒҢеӨ§гҒҚгҒӘжҗҚе®ігҒ«з№ӢгҒҢгӮӢдәӢгҒҢгҒӮгӮҠгҒҲгӮӢгҒЁгҒ„гҒҶгҒ“гҒЁгӮ’з—ӣж„ҹгҒ—гҒҫгҒ—гҒҹгҖӮ
д»–гҒ«гӮӮгҒ„гҒҸгҒӨгҒӢгҒӮгӮҠгҒҫгҒҷгҒҢгҖҒеҫҢиј©гҒҹгҒЎгҒ«гҒҜжҲ‘гҖ…гҒ®еӨұж•—гӮ’ж•ҷиЁ“гҒЁгҒ—гҒҰгҖҒиүҜгҒ„зөҗжһңгӮ’ж®ӢгҒ—гҒҰгҒҸгӮҢгӮӢгҒ“гҒЁгӮ’жңҹеҫ…гҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
д»–гҒ«гӮӮжӣёгҒҚгҒҹгҒ„гҒ“гҒЁгҒҜгҒ„гӮҚгҒ„гӮҚгҒӮгӮҠгҒҫгҒҷгҒҢгҖҒгҒӮгҒҫгӮҠгҒ«гӮӮй•·гҒҸгҒӘгӮҠгҒҷгҒҺгҒҰгҒ—гҒҫгҒҶгҒ®гҒ§гҒ“гҒ®иҫәгҒ§жӯўгӮҒгҒҰгҒҠгҒҚгҒҫгҒҷгҖӮ
гҒ“гӮҢгҒҫгҒ§еҝңжҸҙгҒ—гҒҰгҒҸгҒ гҒ•гҒЈгҒҹж–№гҖ…гҒ«гҒҜжң¬еҪ“гҒ«ж„ҹи¬қгҒ„гҒҹгҒ—гҒҫгҒҷгҖӮ
д»ҠеҫҢгӮӮеҫҢиј©гҒ®еҝңжҸҙгӮ’гӮҲгӮҚгҒ—гҒҸгҒҠйЎҳгҒ„гҒ„гҒҹгҒ—гҒҫгҒҷгҖӮ
гӮігғЎгғігғҲгӮ’е…ЁгҒҰиӘӯгӮҖ / жӣёгҒҸ
жӣёгҒ„гҒҹдәә: жқ‘дёҠгҖҖзҝ” | 12/12/01 07:54
е…ҲйҖұгҒ®йҮ‘жӣңж—ҘгҒ«жҲҗз”°гҒ®ж–№гҒ§гӮЁгӮігғҺгҒ®еӨ§дјҡгҒҢгҒӮгҒЈгҒҹгҒ®гҒ§иЎҢгҒЈгҒҰгҒҚгҒҫгҒ—гҒҹгҖӮеҶҷзңҹгҒҢгҒӮгҒҫгӮҠжүӢе…ғгҒ«гҒӘгҒ„гҒ®гҒ§з°ЎеҚҳгҖҒзІ—жң«гҒ§гҒҜгҒӮгӮҠгҒҫгҒҷгҒҢгҒ–гҒЈгҒЁгҒ”е ұе‘ҠгҒ„гҒҹгҒ—гҒҫгҒҷгҖӮ


гӮігғЎгғігғҲгӮ’е…ЁгҒҰиӘӯгӮҖ / жӣёгҒҸ
гҒ“гӮ“гҒ«гҒЎгҒҜгӮЁгӮігғҺгҒ®еҜәжң¬гҒЁз”ігҒ—гҒҫгҒҷгҖӮе№ҙжң«гҒҢиҝ‘гҒҸгҒӘгҒЈгҒҰгҒҚгҒҰеҶ¬дј‘гҒҝгҒ«е…ҘгӮҠеғ•гӮӮеё°зңҒгҒ—гҖҒе®ҹ家гҒ§д№…гҒ—гҒ¶гӮҠгҒ«гҒ®гӮ“гҒігӮҠгҒ—гҒҰгҒ„гӮӢгҒЁгҒ“гӮҚгҒ§гҒҷгҖӮ